R-thetaタイプのスカラロボットをモデリングしてみた
2022/07/20 categories:3D model| tags:3D model|SCARA|ROBOT|
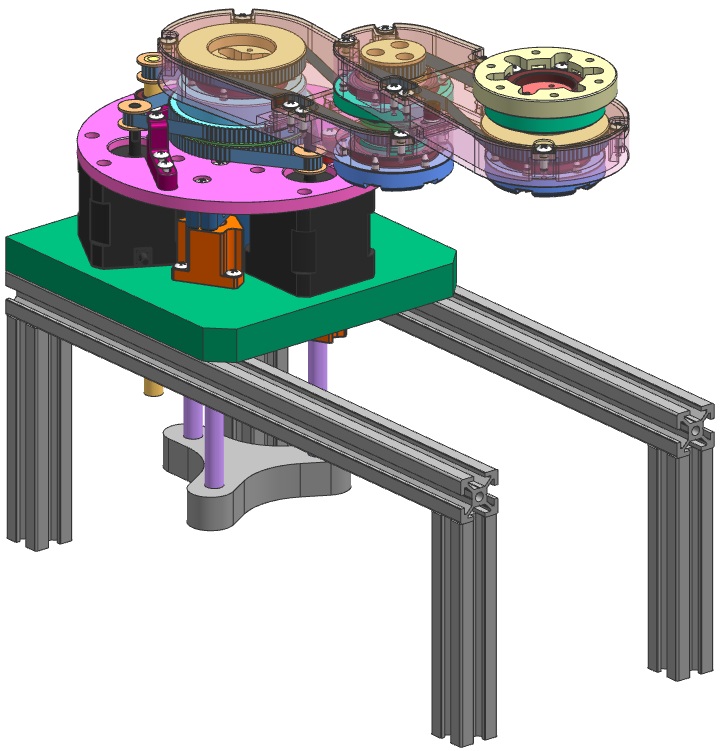
R-thetaタイプのスカラロボットをモデリングしてみました。
参考文献は下記のものです。
- https://res.mdpi.com/d_attachment/electronics/electronics-09-00954/article_deploy/electronics-09-00954-v3.pdf
- https://www.semanticscholar.org/paper/Research-on-a-novel-R-%CE%B8-wafer-handling-robot-Cong-Yu/8eacfe358f47439bf1edf5a6413c6d48e1c39d96
動作イメージ
下記のようにR軸は直進して、θ軸はR軸を回転させて、Z軸はRθを昇降するような動作をします。
Rθタイプのスカラロボットのプーリー比を直して先端が直進できるようになった。関節ごとにモーターがあるタイプと違って、この構造はとても面白くてずっと眺めてられる。早く作りたくてろくに確認もせずプリントしてしまい全然組付けられない構造になっていたから、もう少し構造を見直そう。 pic.twitter.com/jvYvKCdPxg
— ymt-lab (@ymt_lab) July 19, 2022
3Dモデル
| part | image | quantity | STEP | STL |
|---|---|---|---|---|
| J1_ARM | 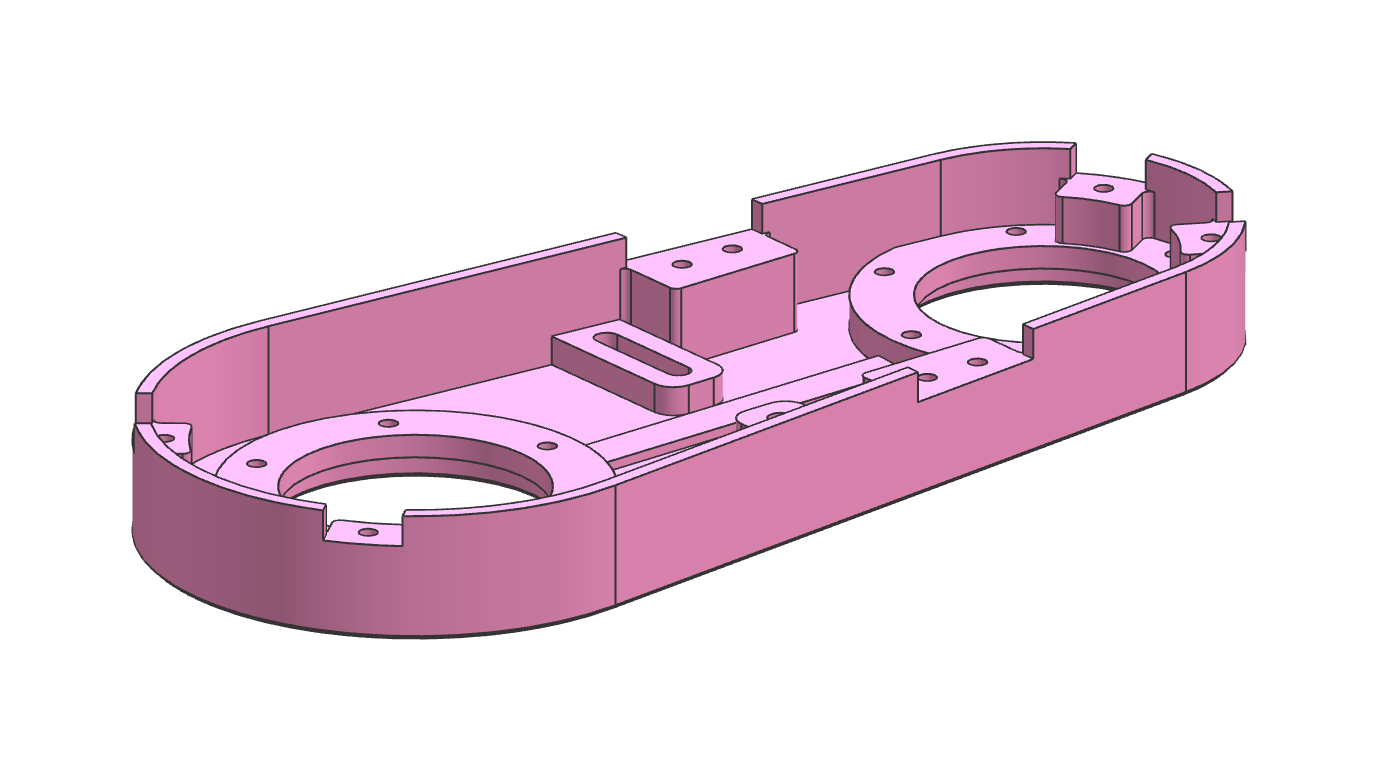 |
2 | ||
| J1_BASE | 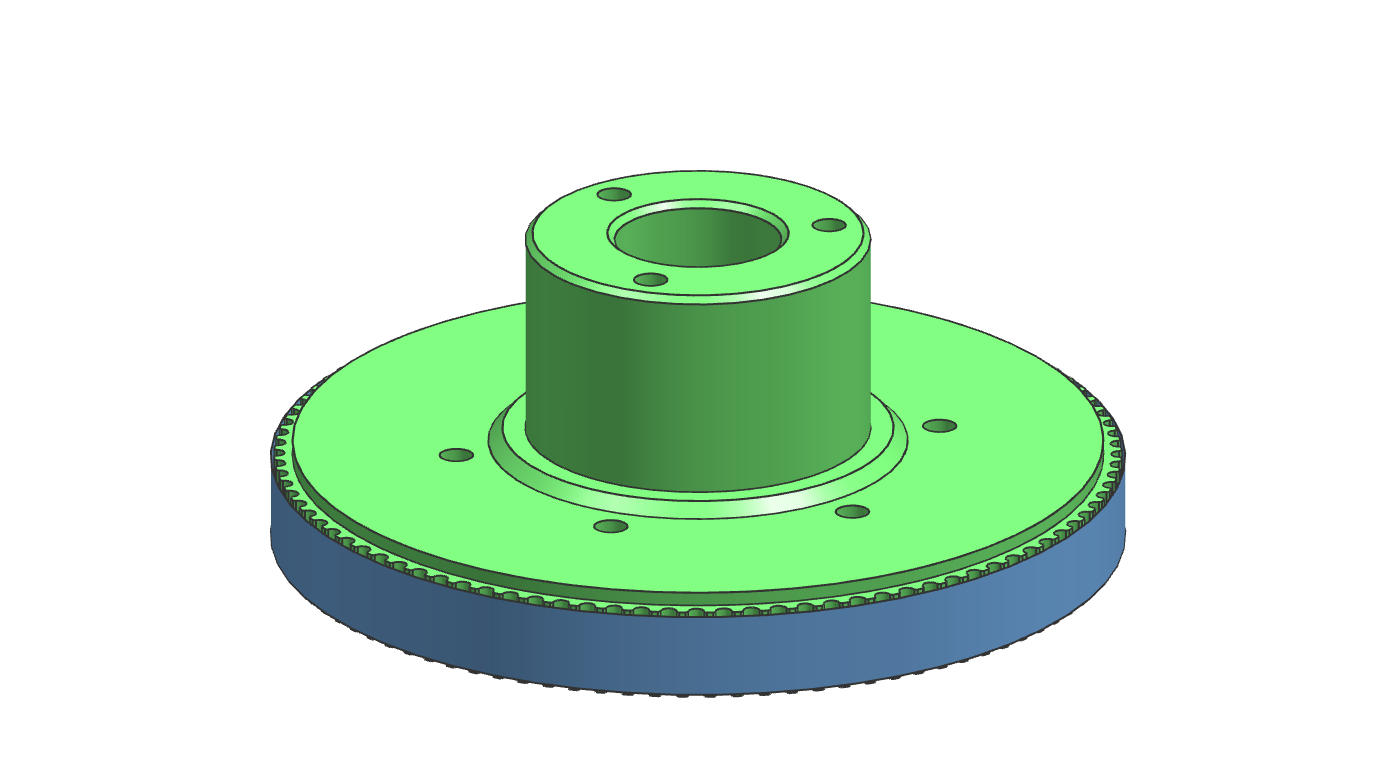 |
1 | ||
| J1_COVER_1 | 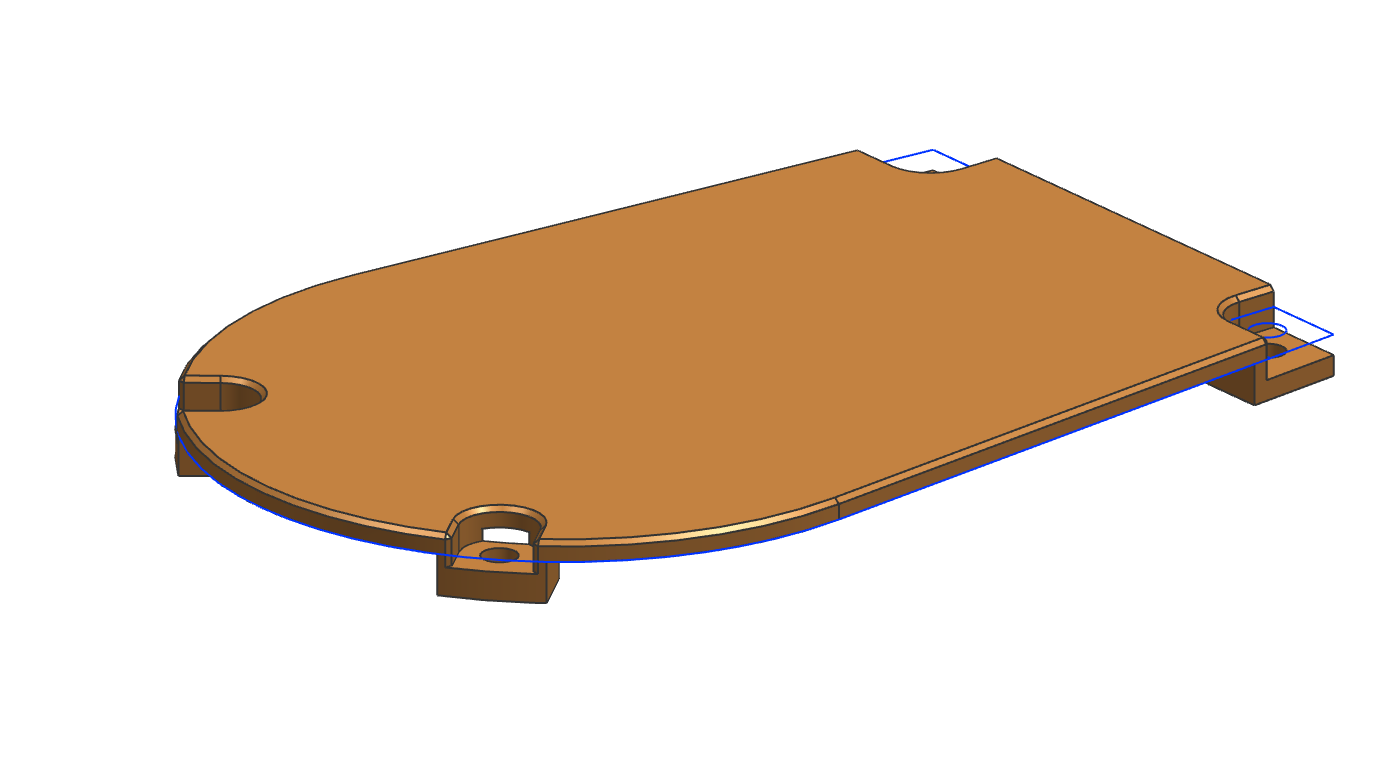 |
1 | ||
| J1_COVER_2 | 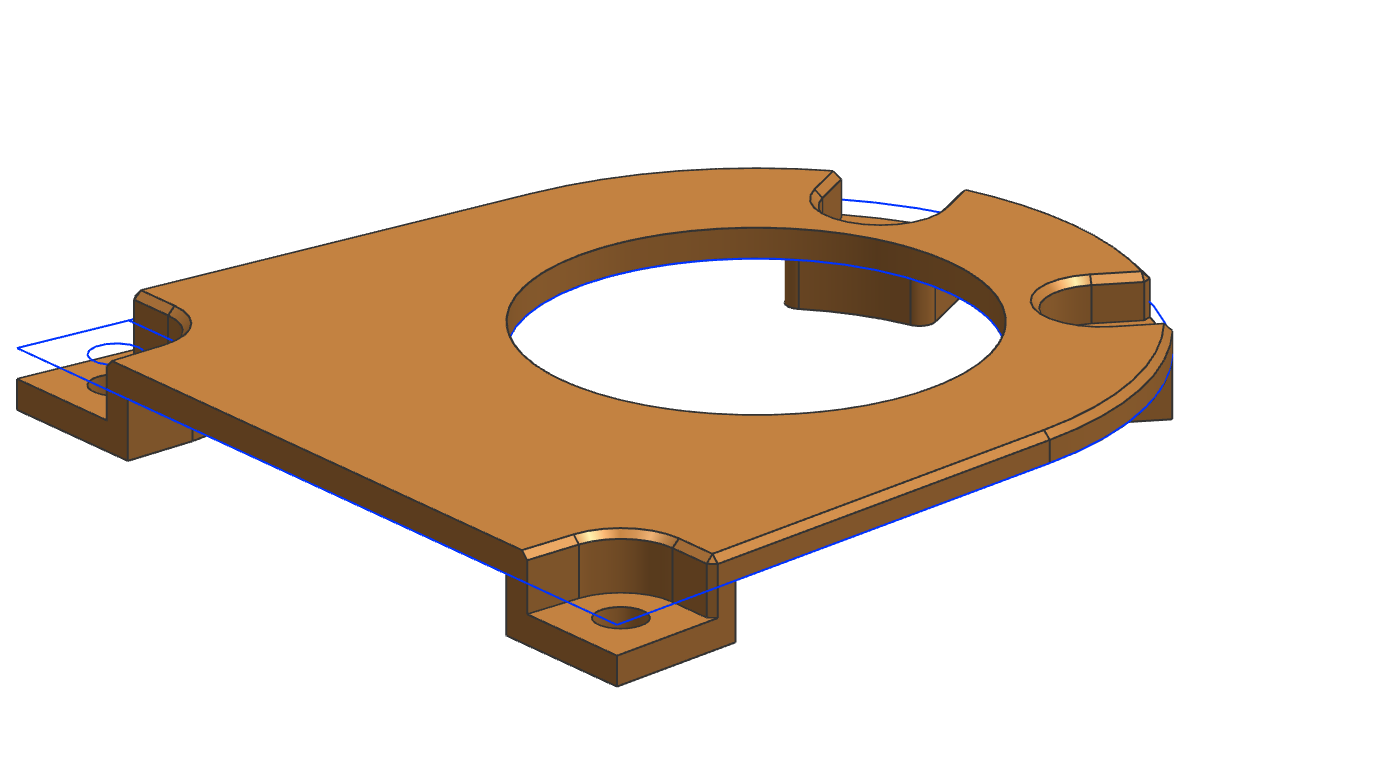 |
1 | ||
| J1_MAIN_SHAFT | 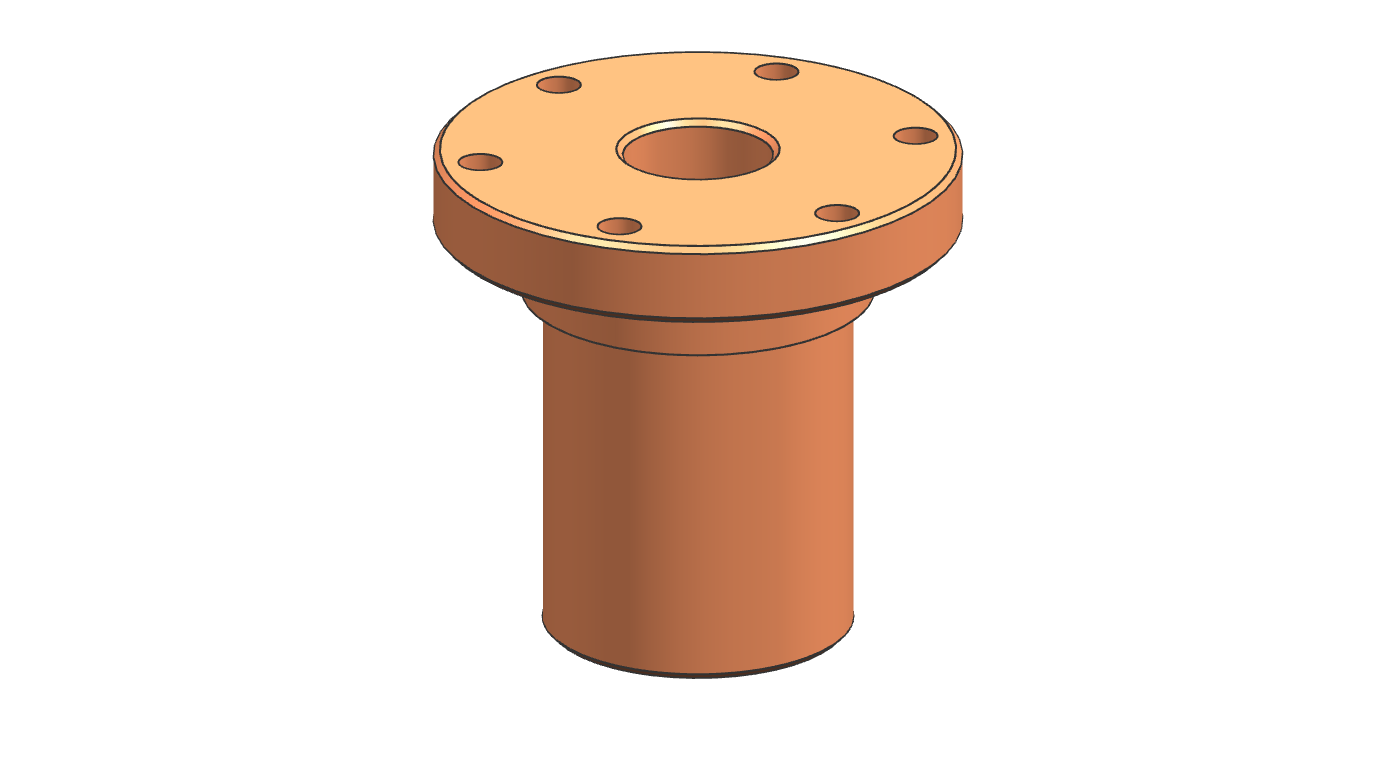 |
1 | ||
| J1_PULLEY_INNER | 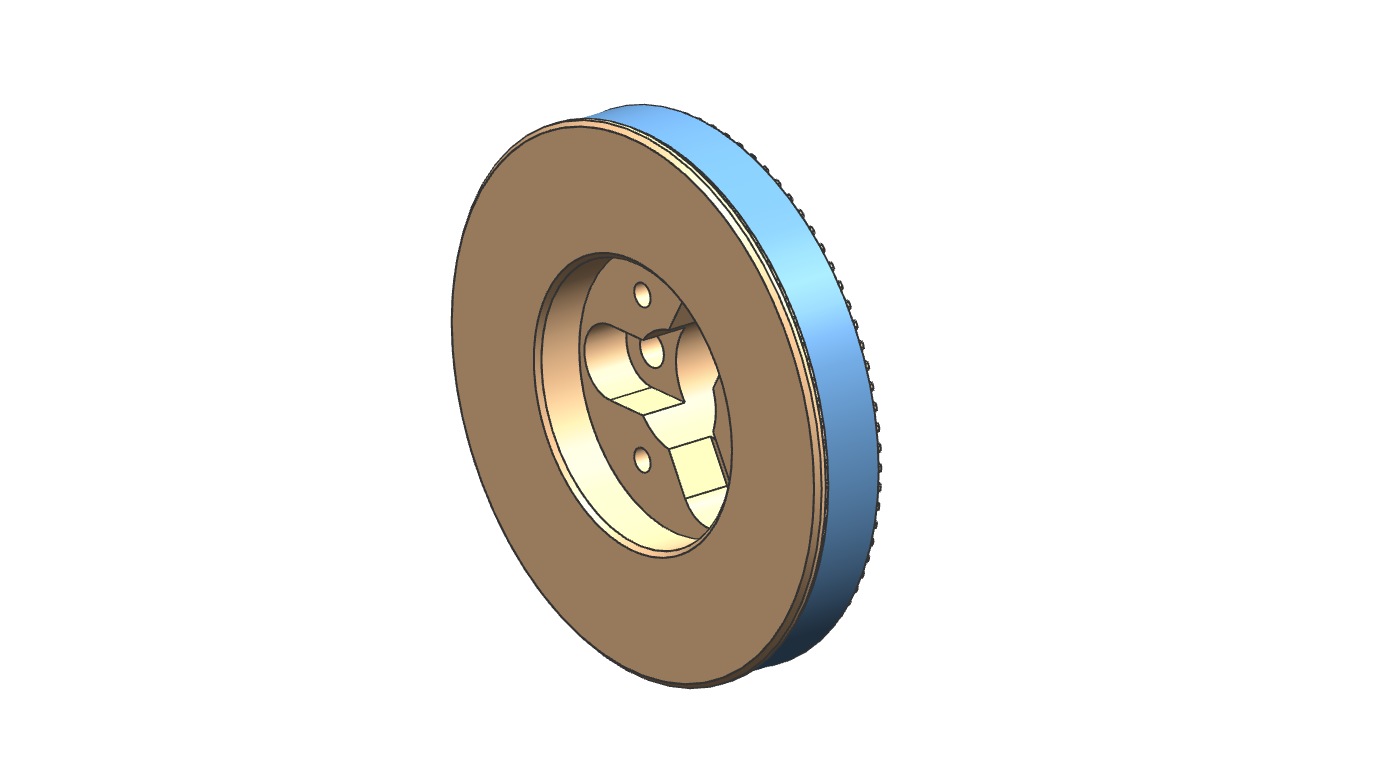 |
2 | ||
| J1_PULLEY_OUTER | 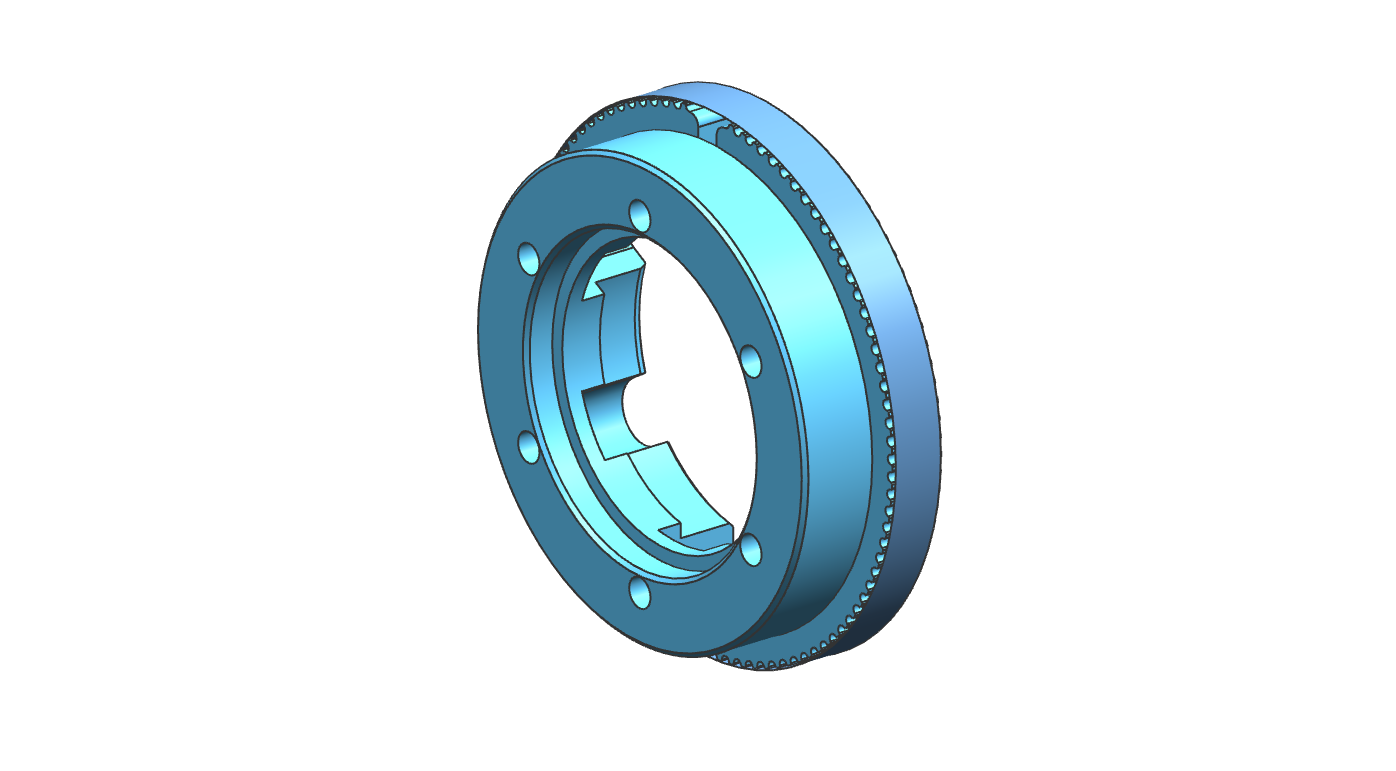 |
1 | ||
| J1_SHAFT |  |
2 | ||
| J1_SHAFT_BASE | 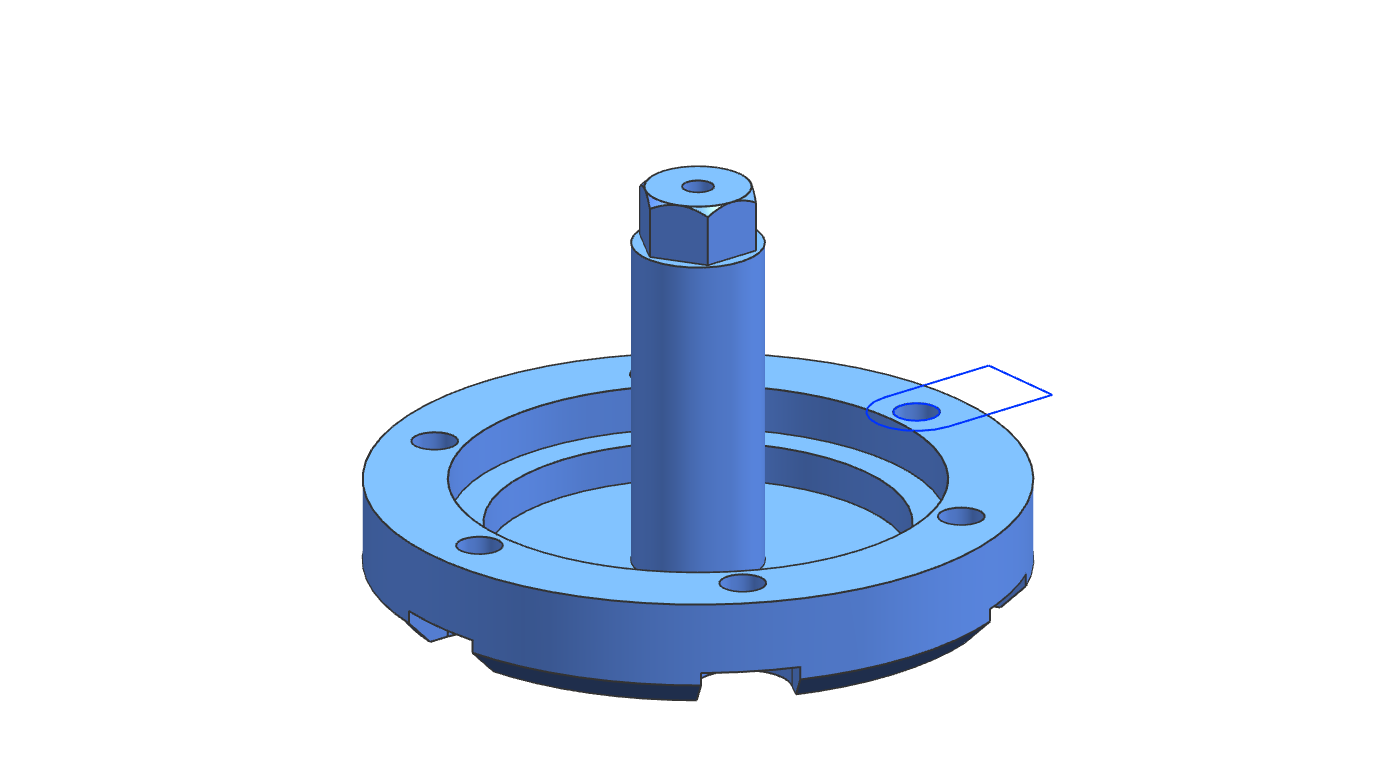 |
2 | ||
| J2_COVER_1 |  |
1 | ||
| J2_COVER_2 | 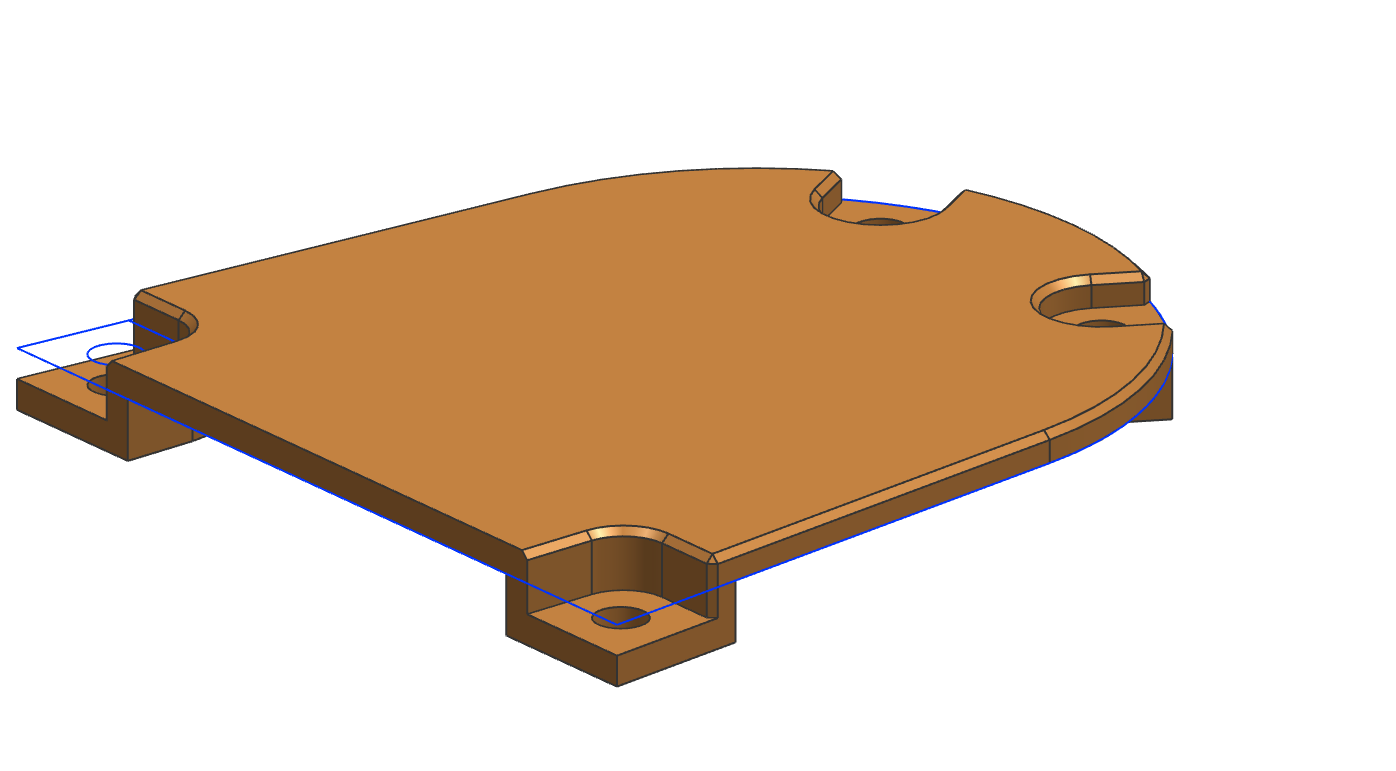 |
1 | ||
| J2_PULLEY_INNER | 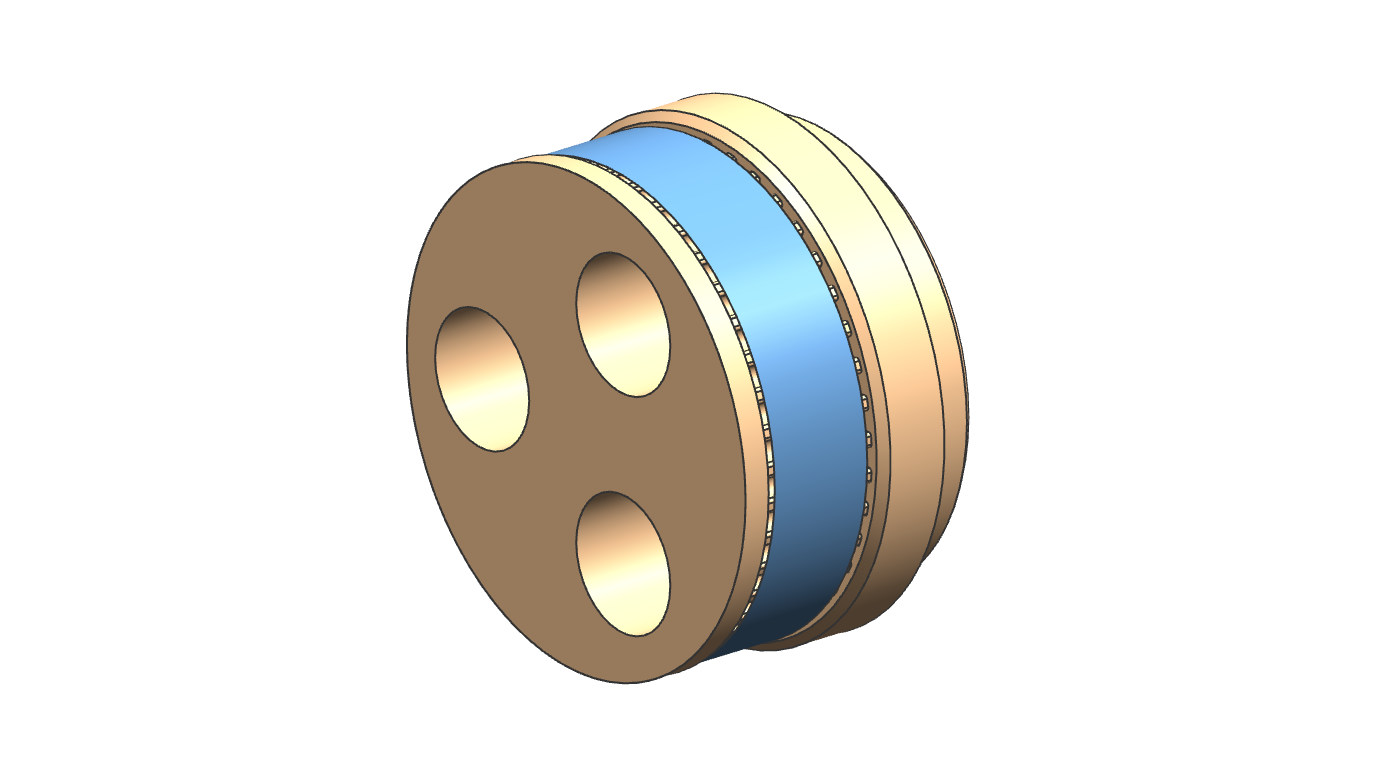 |
1 | ||
| J2_PULLEY_OUTER | 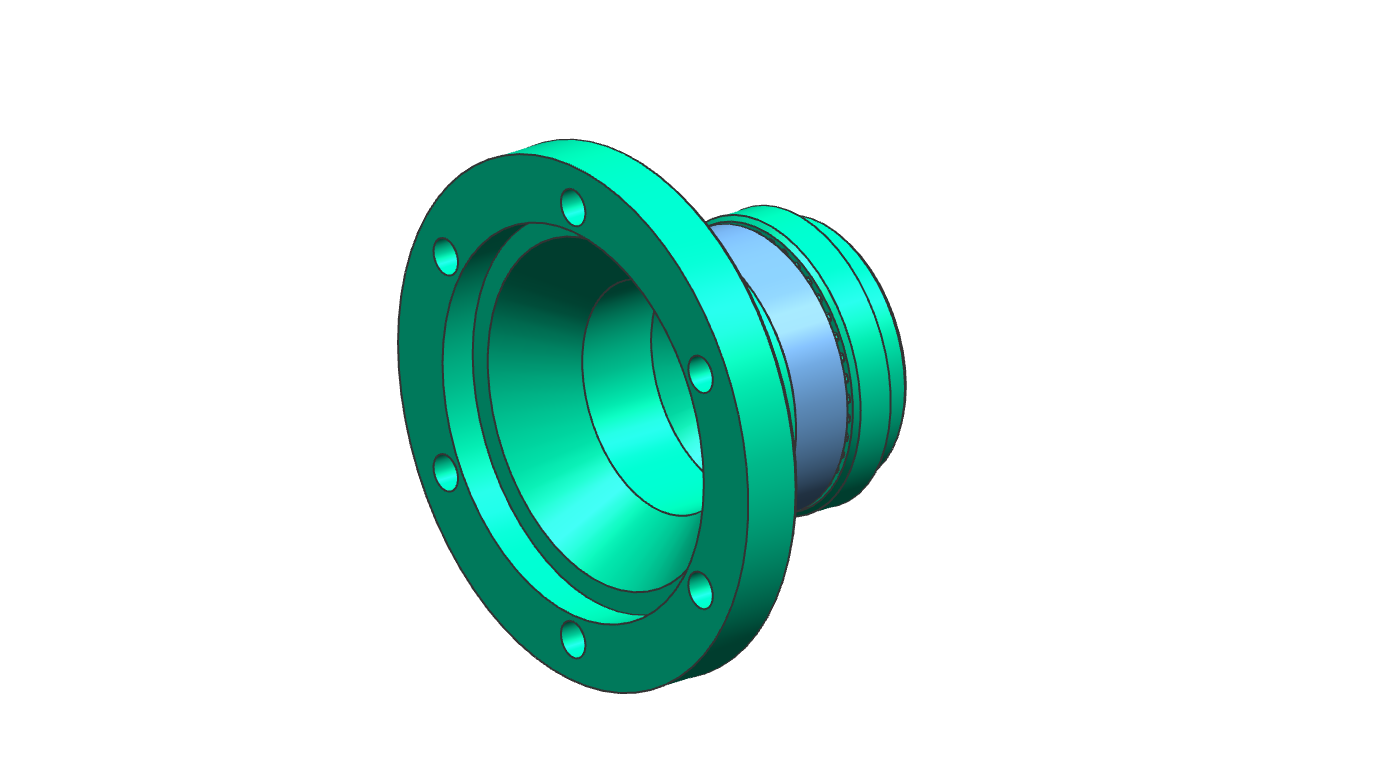 |
1 | ||
| J3_BASE |  |
1 | ||
| J3_SHAFT |  |
1 | ||
| 6805ZZ |  |
8 | ||
| 683ZZ |  |
14 | ||
| 688ZZ |  |
1 | ||
| M3x12_TAPPING |  |
106 | ||
| LM8 |  |
6 | ||
| NEMA17 |  |
3 | ||
| R_MOTOR_PULLEY |  |
4 | ||
| SFF-204-100 |  |
4 | ||
| SFF-204-300 |  |
2 | ||
| T_BEARING_BASE |  |
1 | ||
| Z_BASE |  |
1 | ||
| Z_BEARING_CAP |  |
3 | ||
| Z_BUSH_HOLDER |  |
6 | ||
| Z_NUT |  |
1 | ||
| Z_SHAFT_BASE |  |
1 | ||
| Z_STAY |  |
1 | ||
| IDLER_BRACKET_Z1 |  |
1 | ||
| IDLER_BRACKET_Z2 |  |
2 | ||
| IDLER_SPACER_J1 | 4 |