MicroPythonを入れたESP32とBTS7960でDCモータを回してみる
2020/07/24 categories:ESP32| tags:ESP32|MicroPython|BTS7960|DC motor|
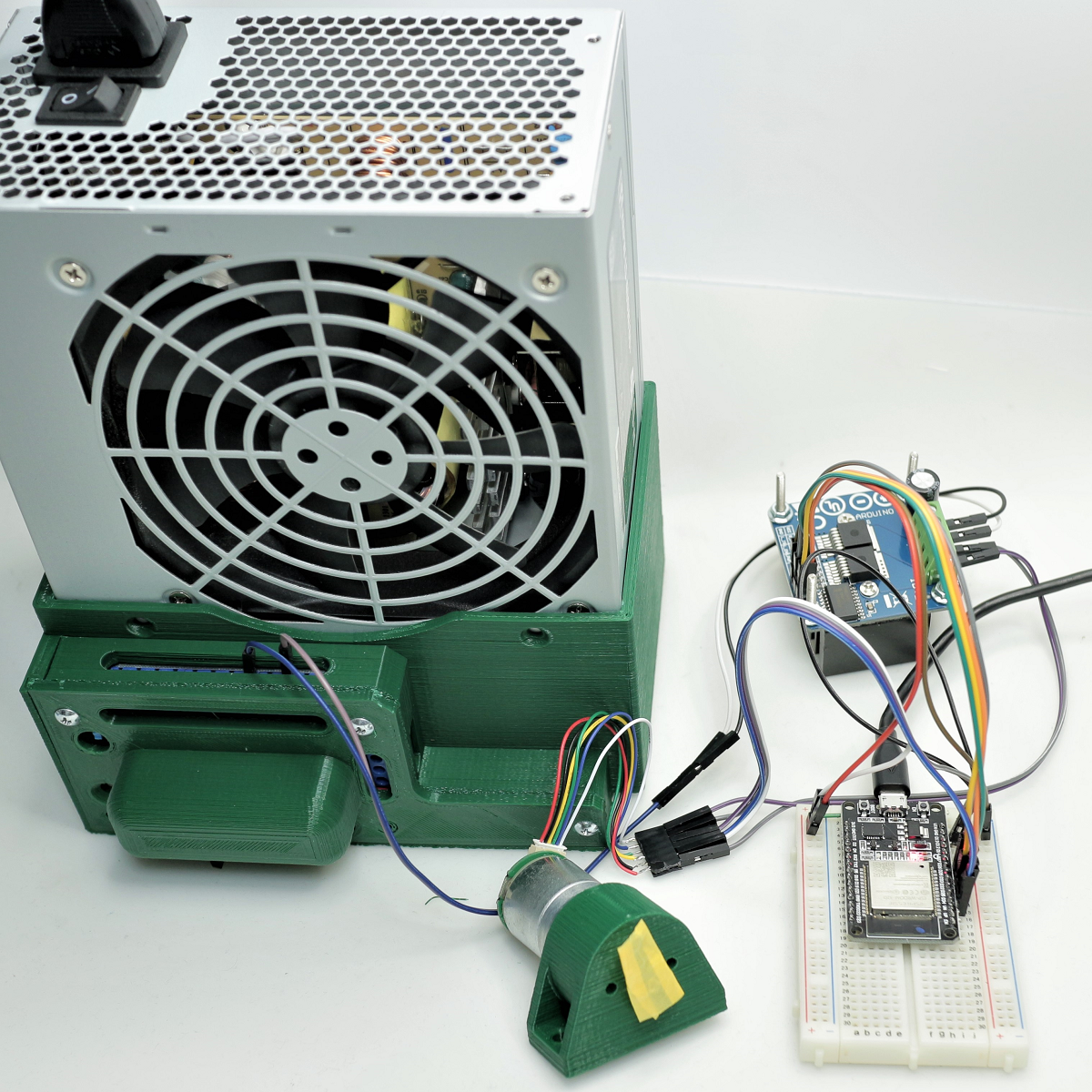
ESP32でBTS7960を使ってDCモーターを回してみました
モーターのピンアサイン
モーターに付属していたケーブルのピンアサインは下記の通りでした。ただし、ケーブルの色の並びがいろいろあるようで、基板を正面にしてコネクタが左側に来るように見た場合、上から順番に下記のようなピンアサインになるようです。
| 色 | 機能 | ピン |
|---|---|---|
| 赤 | モーター(-) | 1 |
| 黒 | エンコーダ電源 | 2 |
| 黄 | エンコーダA相 | 3 |
| 緑 | エンコーダB相 | 4 |
| 青 | エンコーダGND | 5 |
| 白 | モーター(+) | 6 |
BTS7960のピンアサイン
モータードライバはBTS7960を使用しました。ピンアサインは下記の通りです
| ピン | 機能 |
|---|---|
| VCC | 電源 |
| GND | グラウンド |
| R_IS | 電流検出とエラーフラグの出力 |
| L_IS | 電流検出とエラーフラグの出力 |
| R_EN | Rのenable |
| L_EN | Lのenable |
| RPWM | RのPWM |
| LPWM | LのPWM |
BTS7960の動作パターン
それぞれのピンへの入力によるモーターの動作パターンは下記の通りになります
| R_EN | L_EN | RPWM | LPWM | |
|---|---|---|---|---|
| 正転 | 1 | 1 | 1 | 0 |
| 逆転 | 1 | 1 | 0 | 1 |
| ニュートラル | 0 | 0 | X | X |
| ブレーキ | 1 | 1 | 0 | 0 |
BTS7960のデッドタイム生成
データシート内に下記のように、ドライバIC内の回路によって保証され、MOSFETをオフしてから別のMOSFETをオンするまでにデッドタイムが発生するとあります。従って、ソフトによるデッドタイム生成は必要ないでしょう。
This is assured by a circuit in the driver IC, generating a so called dead time between switching off one MOSFET and switching on the other
動作の様子
正転後にブレーキ、逆転後にニュートラルを行い、停止時にエンコーダの値を送信するプログラムを動作させた様子です。
ソースコード
import time
from machine import Pin
class Encorder():
def __init__(self, pin_a, pin_b):
self.pin_a, self.pin_b = pin_a, pin_b
self.position, self.value, self.direction = 0, 0, 0
self.table = [
0, 1,-1, 0,
-1, 0, 0, 1,
1, 0, 0,-1,
0,-1, 1, 0
]
def check(self, pin):
self.value = (self.value << 2) + self.pin_a.value() + (self.pin_b.value() << 1)
self.value = self.value & 0x0F
self.direction = self.table[self.value]
self.position += self.direction
class BTS7960():
def __init__(self, r_en, l_en, rpwm, lpwm):
self.R_EN = r_en
self.L_EN = l_en
self.RPWM = rpwm
self.LPWM = lpwm
self.neutral()
def right(self):
self.R_EN.on()
self.L_EN.on()
self.LPWM.off()
self.RPWM.on()
def left(self):
self.R_EN.on()
self.L_EN.on()
self.RPWM.off()
self.LPWM.on()
def neutral(self):
self.R_EN.off()
self.L_EN.off()
self.RPWM.off()
self.LPWM.off()
def brake(self):
self.R_EN.on()
self.L_EN.on()
self.RPWM.off()
self.LPWM.off()
## GPIO settings
encoder_a = Pin(34, Pin.IN)
encoder_b = Pin(35, Pin.IN)
r_en = Pin(25, Pin.OUT)
l_en = Pin(26, Pin.OUT)
rpwm = Pin(32, Pin.OUT)
lpwm = Pin(33, Pin.OUT)
## Encoorder settings
encorder = Encorder(encoder_a, encoder_b)
## Interrupt settings
encoder_a.irq( encorder.check )
encoder_b.irq( encorder.check )
bts7960 = BTS7960(r_en, l_en, rpwm, lpwm)
bts7960.neutral()
time.sleep(3)
print('start')
while True:
bts7960.left()
print('left')
time.sleep(1)
bts7960.brake()
print('brake')
print(encorder.position, encorder.direction)
time.sleep(0.5)
bts7960.right()
print('right')
time.sleep(1)
bts7960.neutral()
print('neutral')
print(encorder.position, encorder.direction)
time.sleep(0.5)