R-thetaタイプのスカラロボットを動かしてみた
2022/07/31 categories:3D Printer| tags:3D Printer|3D model|SCARA|ROBOT|Seeeduino XIAO|
R-thetaタイプのスカラロボットをSeeeduino XIAOで動かしてみました。
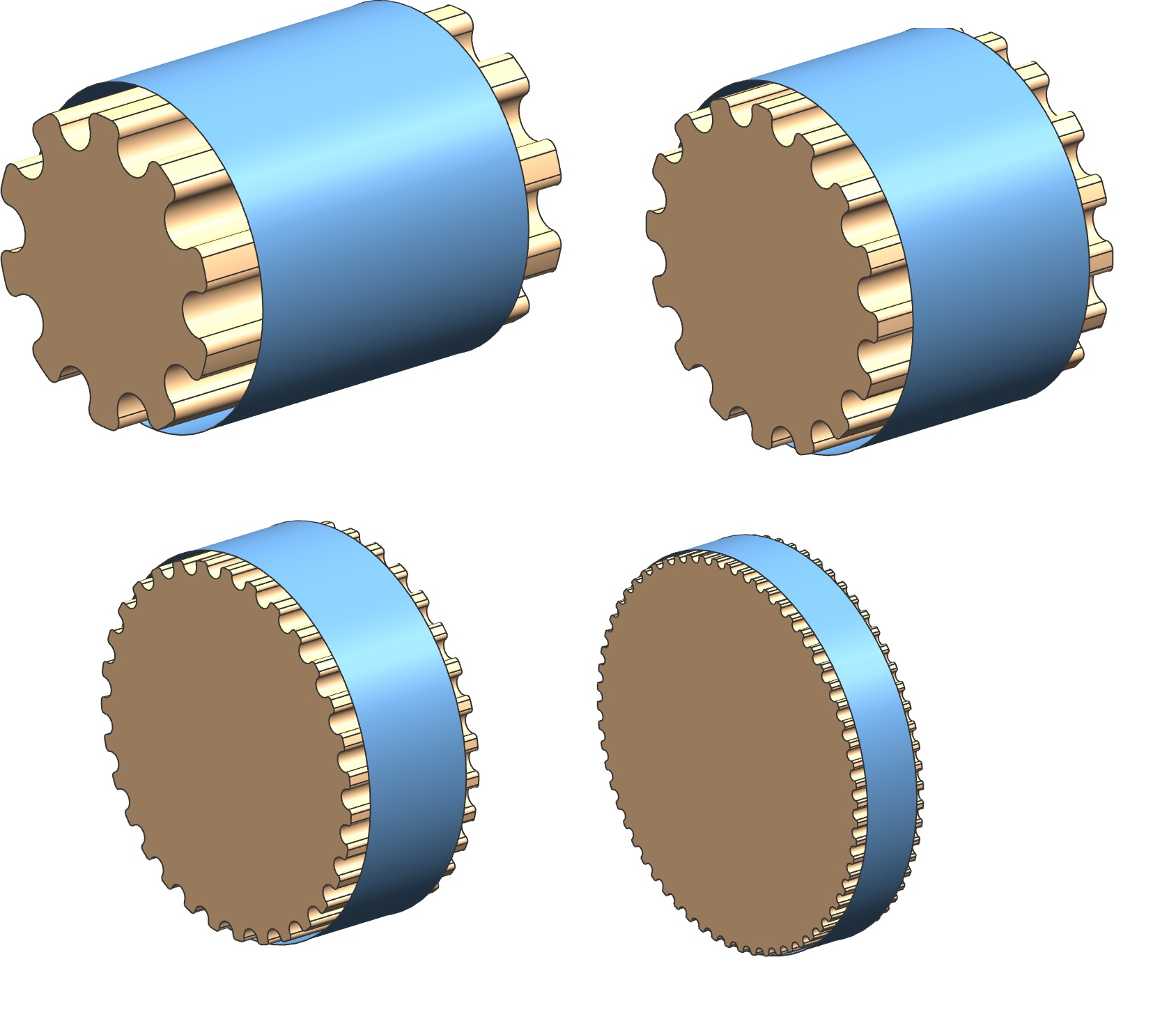
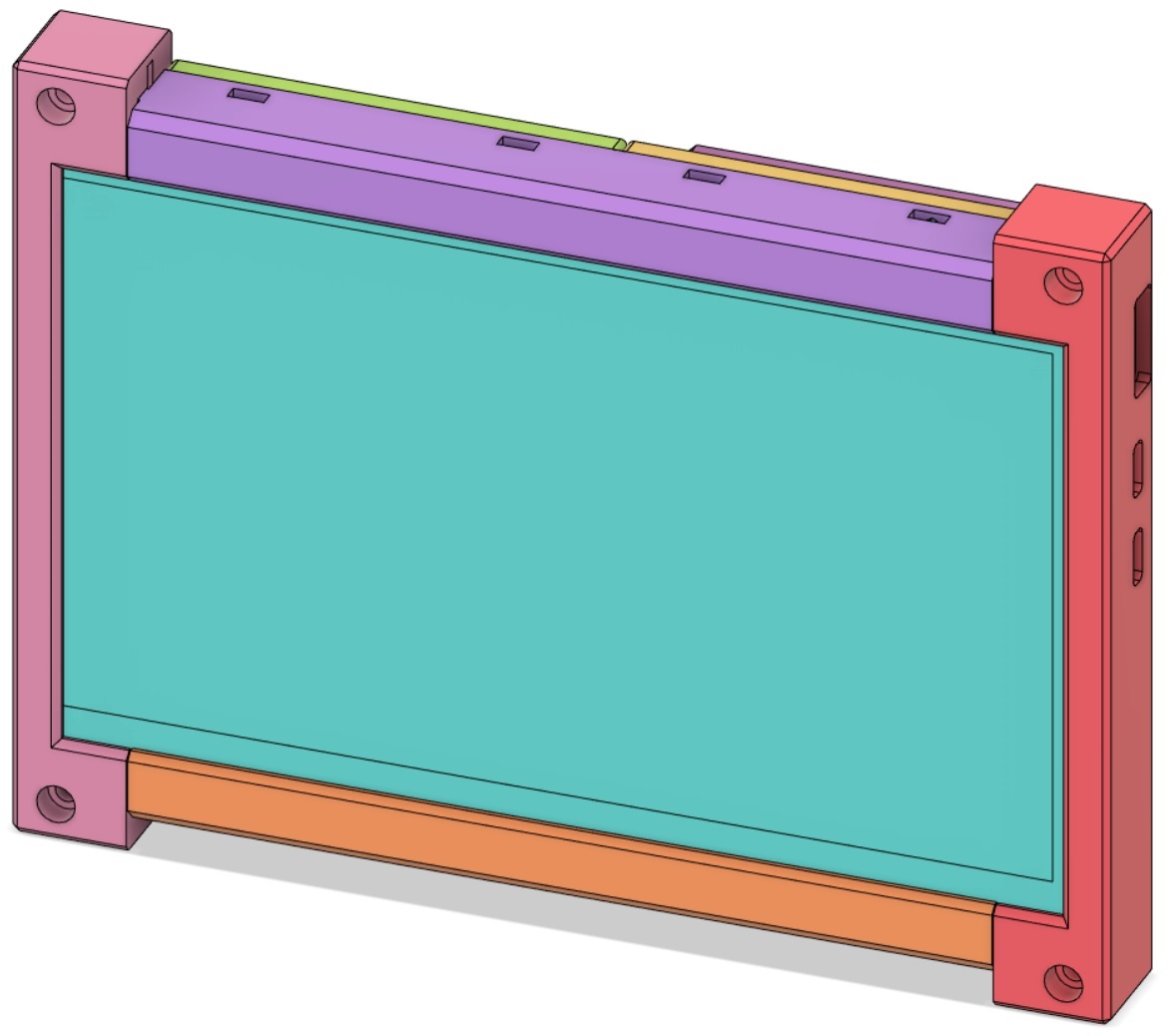
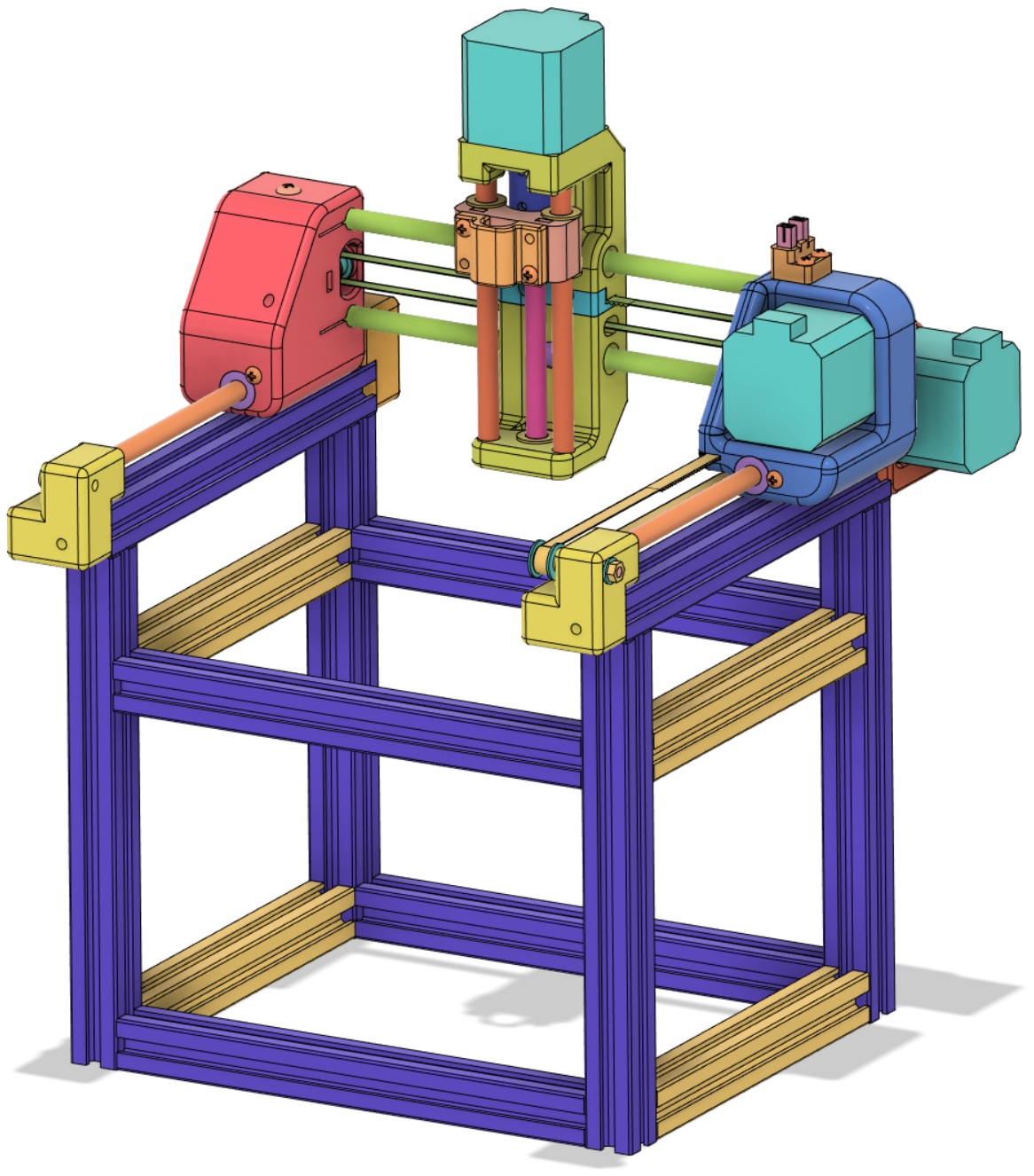
関連資料
接続図

動作イメージ
PCにXBOXコントローラとTMC2208を取り付けたSeeeduino XIAOを接続して、3Dプリンタで作ったスカラロボットを動かしてみました pic.twitter.com/34EfbEYVdS
— ymt-lab (@ymt_lab) July 31, 2022
ソースコード
Seeeduino XIAOのソースコード
#include <Arduino.h>
#include <TimerTC3.h>
const int ledPin = 13;
bool timer_frag = false;
int motor_value[] = {0, 0, 0, 0};
int serial_data = 0;
long period = 2000;
void TimerCnt(){
timer_frag = true;
}
void setup() {
pinMode( 0, OUTPUT);
pinMode( 1, OUTPUT);
pinMode( 2, OUTPUT);
pinMode( 3, OUTPUT);
pinMode(10, OUTPUT);
pinMode(ledPin, OUTPUT);
Serial.begin(115200);
digitalWrite(10, LOW);
TimerTc3.initialize(period);
TimerTc3.attachInterrupt(TimerCnt);
}
void loop() {
if( Serial.available() ){
digitalWrite(ledPin, HIGH);
serial_data = Serial.read();
switch (serial_data)
{
case 0:
motor_value[0] = 0;
motor_value[1] = 0;
motor_value[2] = 0;
motor_value[3] = 0;
break;
case 1:
motor_value[0] = 0;
motor_value[1] = 1;
motor_value[2] = 0;
motor_value[3] = 0;
break;
case 2:
motor_value[0] = 1;
motor_value[1] = 1;
motor_value[2] = 0;
motor_value[3] = 0;
break;
case 3:
motor_value[0] = 0;
motor_value[1] = 1;
motor_value[2] = 0;
motor_value[3] = 1;
break;
case 4:
motor_value[0] = 1;
motor_value[1] = 1;
motor_value[2] = 1;
motor_value[3] = 1;
break;
case 5:
period += 100;
TimerTc3.stop();
TimerTc3.setPeriod(period);
TimerTc3.start();
break;
case 6:
period -= 100;
if(period < 1) period = 1;
TimerTc3.stop();
TimerTc3.setPeriod(period);
TimerTc3.start();
break;
default:
break;
}
digitalWrite(ledPin, LOW);
}
if((serial_data>0) & timer_frag){
for(int i=0; i<4; i++){
digitalWrite(i, motor_value[i]);
}
digitalWrite(0, LOW);
digitalWrite(1, LOW);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
timer_frag = false;
}
}PCのソースコード
# -*- coding: utf-8 -*-
import sys
from PyQt6 import QtWidgets, QtCore, QtGui, QtSerialPort
import pygame
import pygame.locals
import time
class Mainwindow(QtWidgets.QMainWindow):
def __init__(self) -> None:
super().__init__()
self.joystick = Joystick(self)
self.port = QtSerialPort.QSerialPort('COM9')
self.port.open(QtCore.QIODevice.OpenModeFlag.ReadWrite)
self.text_edit = QtWidgets.QPlainTextEdit()
self.m1_cw_button = Button('M1 CW')
self.m1_ccw_button = Button('M1 CCW')
self.m1m2_cw_button = Button('M1 M2 CW')
self.m1m2_ccw_button = Button('M1 M2 CCW')
self.setCentralWidget(QtWidgets.QWidget())
self.centralWidget().setLayout(QtWidgets.QGridLayout())
self.centralWidget().layout().addWidget(self.m1_cw_button, 0, 0, 1, 1)
self.centralWidget().layout().addWidget(self.m1_ccw_button, 1, 0, 1, 1)
self.centralWidget().layout().addWidget(self.m1m2_cw_button, 0, 1, 1, 1)
self.centralWidget().layout().addWidget(self.m1m2_ccw_button, 1, 1, 1, 1)
self.centralWidget().layout().addWidget(self.text_edit, 2, 0, 1, 2)
self.m1_cw_button.pressed.connect(lambda : self.send(1))
self.m1_ccw_button.pressed.connect(lambda : self.send(2))
self.m1m2_cw_button.pressed.connect(lambda : self.send(3))
self.m1m2_ccw_button.pressed.connect(lambda : self.send(4))
self.m1_cw_button.released.connect(lambda : self.send(0))
self.m1_ccw_button.released.connect(lambda : self.send(0))
self.m1m2_cw_button.released.connect(lambda : self.send(0))
self.m1m2_ccw_button.released.connect(lambda : self.send(0))
self.joystick.B_PRESSED.connect(lambda : self.send(1))
self.joystick.A_PRESSED.connect(lambda : self.send(2))
self.joystick.L_PRESSED.connect(lambda : self.send(3))
self.joystick.R_PRESSED.connect(lambda : self.send(4))
self.joystick.DOWN_PRESSED.connect(lambda : self.send(5))
self.joystick.UP_PRESSED.connect(lambda : self.send(6))
self.joystick.A_RELEASED.connect(lambda : self.send(0))
self.joystick.B_RELEASED.connect(lambda : self.send(0))
self.joystick.R_RELEASED.connect(lambda : self.send(0))
self.joystick.L_RELEASED.connect(lambda : self.send(0))
self.joystick.start()
def send(self, data):
self.port.writeData(bytes([data]))
texts = '{}\n{}'.format(data, self.text_edit.toPlainText()).splitlines()
self.text_edit.setPlainText('\n'.join(texts[:100]))
def closeEvent(self, a0: QtGui.QCloseEvent) -> None:
self.joystick.terminate()
return super().closeEvent(a0)
class Button(QtWidgets.QPushButton):
def __init__(self, text):
super().__init__()
self.setText(text)
self.setMinimumSize(60, 60)
class Joystick(QtCore.QThread):
A_PRESSED = QtCore.pyqtSignal()
B_PRESSED = QtCore.pyqtSignal()
X_PRESSED = QtCore.pyqtSignal()
Y_PRESSED = QtCore.pyqtSignal()
R_PRESSED = QtCore.pyqtSignal()
L_PRESSED = QtCore.pyqtSignal()
UP_PRESSED = QtCore.pyqtSignal()
DOWN_PRESSED = QtCore.pyqtSignal()
LEFT_PRESSED = QtCore.pyqtSignal()
RIGHT_PRESSED = QtCore.pyqtSignal()
VIEW_PRESSED = QtCore.pyqtSignal()
MENU_PRESSED = QtCore.pyqtSignal()
A_RELEASED = QtCore.pyqtSignal()
B_RELEASED = QtCore.pyqtSignal()
X_RELEASED = QtCore.pyqtSignal()
Y_RELEASED = QtCore.pyqtSignal()
R_RELEASED = QtCore.pyqtSignal()
L_RELEASED = QtCore.pyqtSignal()
UP_RELEASED = QtCore.pyqtSignal()
DOWN_RELEASED = QtCore.pyqtSignal()
LEFT_RELEASED = QtCore.pyqtSignal()
RIGHT_RELEASED = QtCore.pyqtSignal()
VIEW_RELEASED = QtCore.pyqtSignal()
MENU_RELEASED = QtCore.pyqtSignal()
AXIS_MOVED = QtCore.pyqtSignal(float, float, float, float, float, float)
def __init__(self, parent):
super().__init__(parent)
pygame.init()
pygame.joystick.init()
self.joystick = pygame.joystick.Joystick(0)
self.joystick.init()
self.hat_prev = 0
def get_hat(self):
hat = self.joystick.get_hat(0)
val = 0
val += int(hat[1] == 1) << 0 # up
val += int(hat[1] == -1) << 1 # down
val += int(hat[0] == 1) << 2 # right
val += int(hat[0] == -1) << 3 # left
val, self.hat_prev = val - self.hat_prev, val
return val
def run(self) -> None:
while True:
for e in pygame.event.get():
if e.type == pygame.locals.JOYAXISMOTION:
self.AXIS_MOVED.emit(
self.joystick.get_axis(0), #left horizontal
self.joystick.get_axis(1), #left vertical
self.joystick.get_axis(2), #right horizontal
self.joystick.get_axis(3), #right vertical
self.joystick.get_axis(4), #left trigger
self.joystick.get_axis(5), #right triggr
)
elif e.type == pygame.locals.JOYHATMOTION:
h = self.get_hat()
if h > 0:
if (h >> 0) & 1: self.UP_PRESSED.emit()
if (h >> 1) & 1: self.DOWN_PRESSED.emit()
if (h >> 2) & 1: self.RIGHT_PRESSED.emit()
if (h >> 3) & 1: self.LEFT_PRESSED.emit()
else:
if (abs(h) >> 0) & 1: self.UP_RELEASED.emit()
if (abs(h) >> 1) & 1: self.DOWN_RELEASED.emit()
if (abs(h) >> 2) & 1: self.RIGHT_RELEASED.emit()
if (abs(h) >> 3) & 1: self.LEFT_RELEASED.emit()
elif e.type == pygame.locals.JOYBUTTONDOWN:
if e.button == 0: self.A_PRESSED.emit()
if e.button == 1: self.B_PRESSED.emit()
if e.button == 2: self.X_PRESSED.emit()
if e.button == 3: self.Y_PRESSED.emit()
if e.button == 4: self.L_PRESSED.emit()
if e.button == 5: self.R_PRESSED.emit()
if e.button == 6: self.VIEW_PRESSED.emit()
if e.button == 7: self.MENU_PRESSED.emit()
elif e.type == pygame.locals.JOYBUTTONUP:
if e.button == 0: self.A_RELEASED.emit()
if e.button == 1: self.B_RELEASED.emit()
if e.button == 2: self.X_RELEASED.emit()
if e.button == 3: self.Y_RELEASED.emit()
if e.button == 4: self.L_RELEASED.emit()
if e.button == 5: self.R_RELEASED.emit()
if e.button == 6: self.VIEW_RELEASED.emit()
if e.button == 7: self.MENU_RELEASED.emit()
if __name__ == '__main__':
app = QtWidgets.QApplication(sys.argv)
w = Mainwindow()
w.show()
app.exec()