3Dプリンタで作るロボットジョイント
2020/07/04 categories:3D Printer| tags:3D Printer| robot_joint|
3Dプリンタで6軸ロボットを作りたいので関節用のアクチュエータをモデリングしました。が、没作としてアップします。
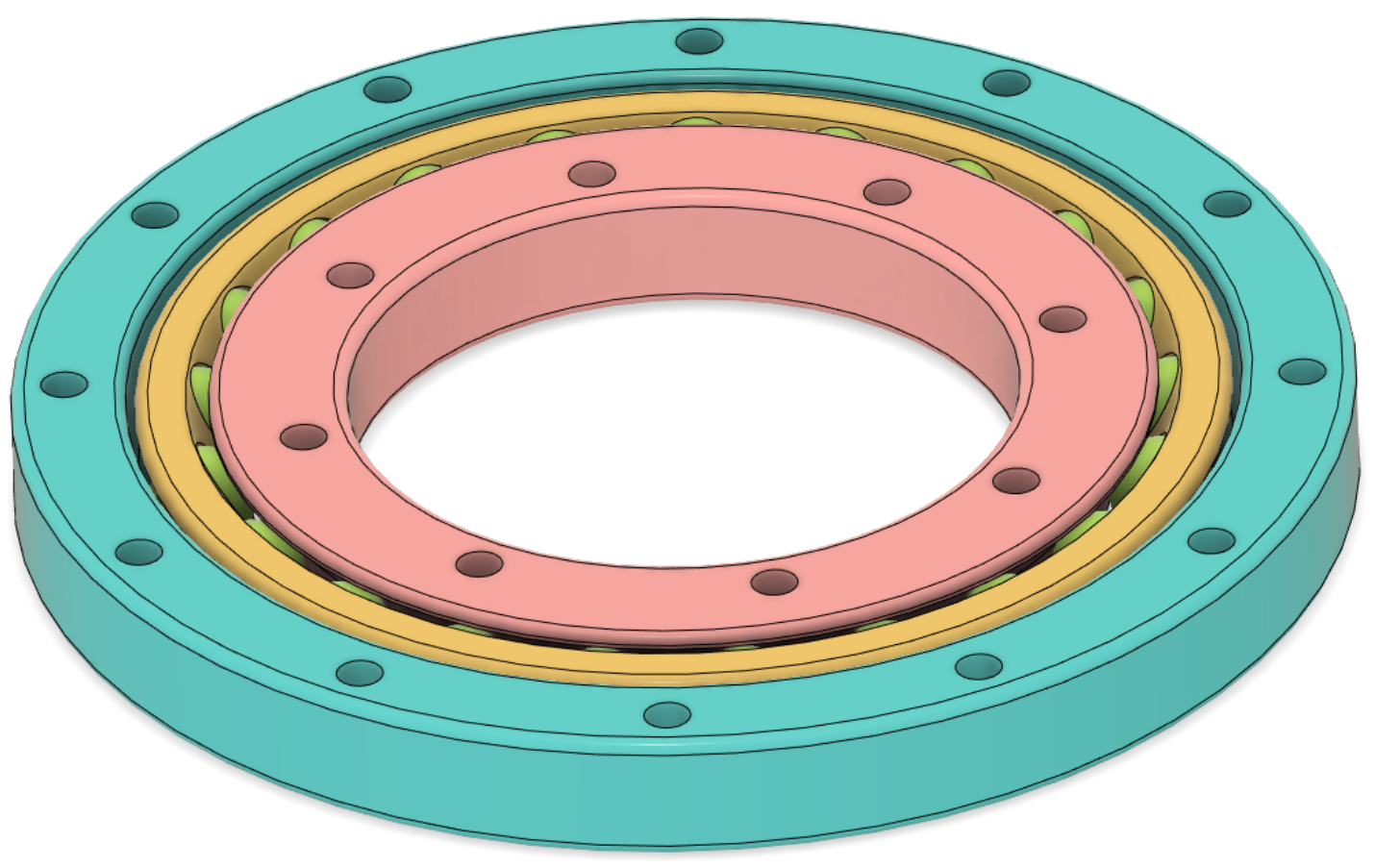
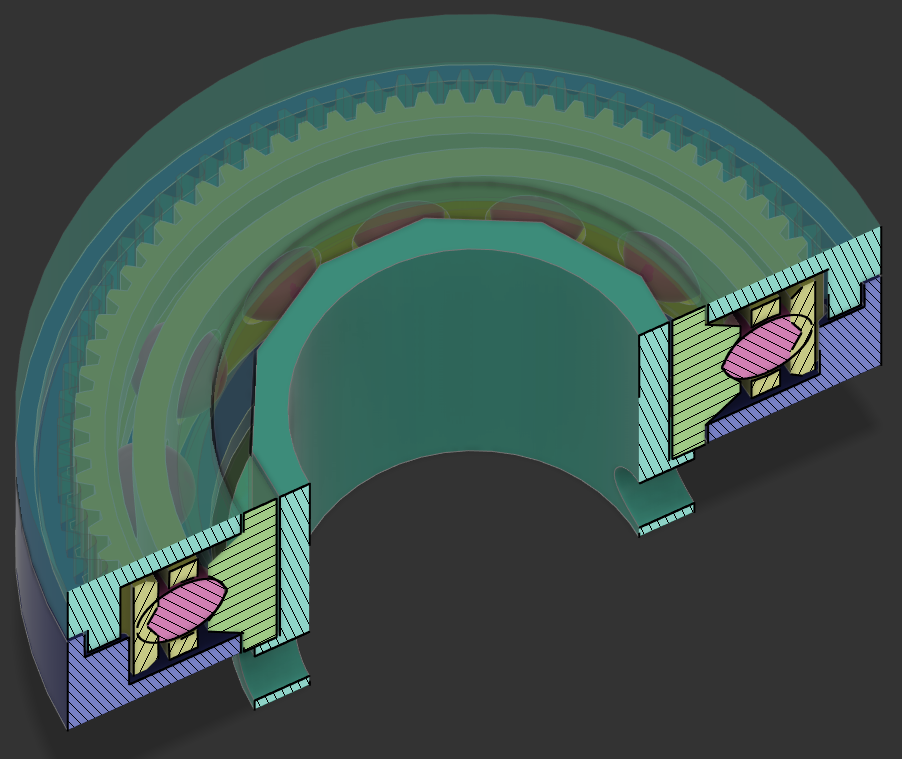
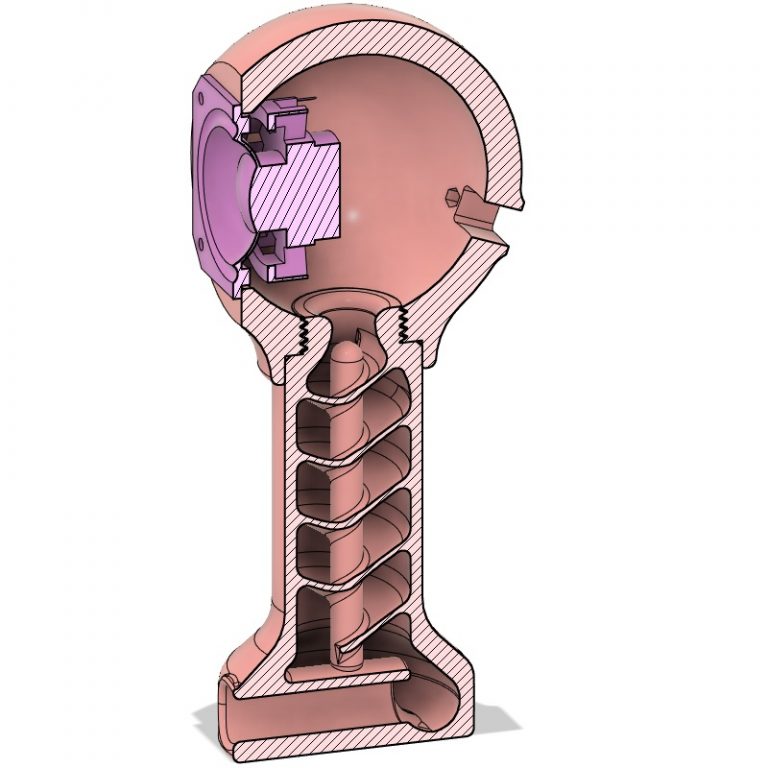
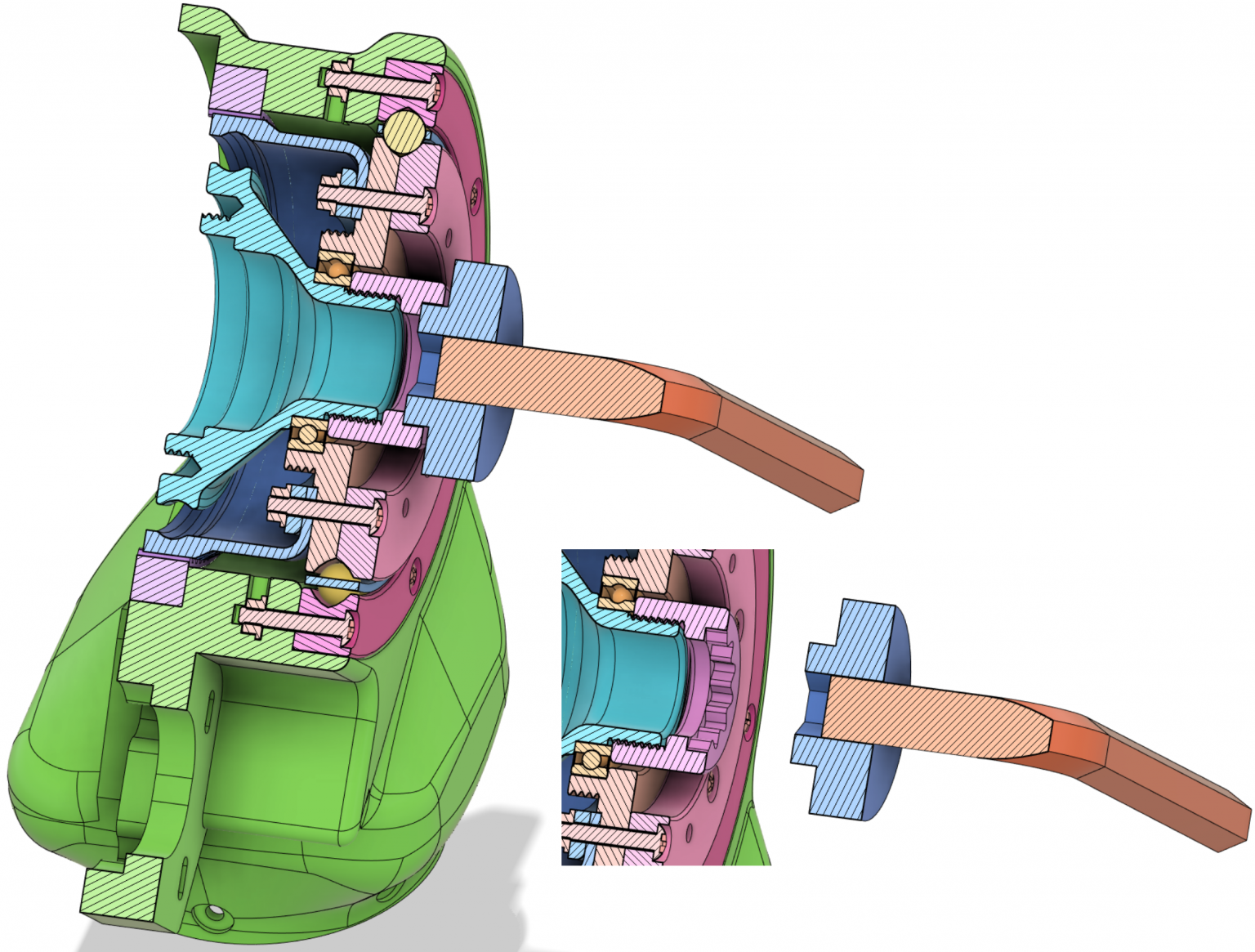
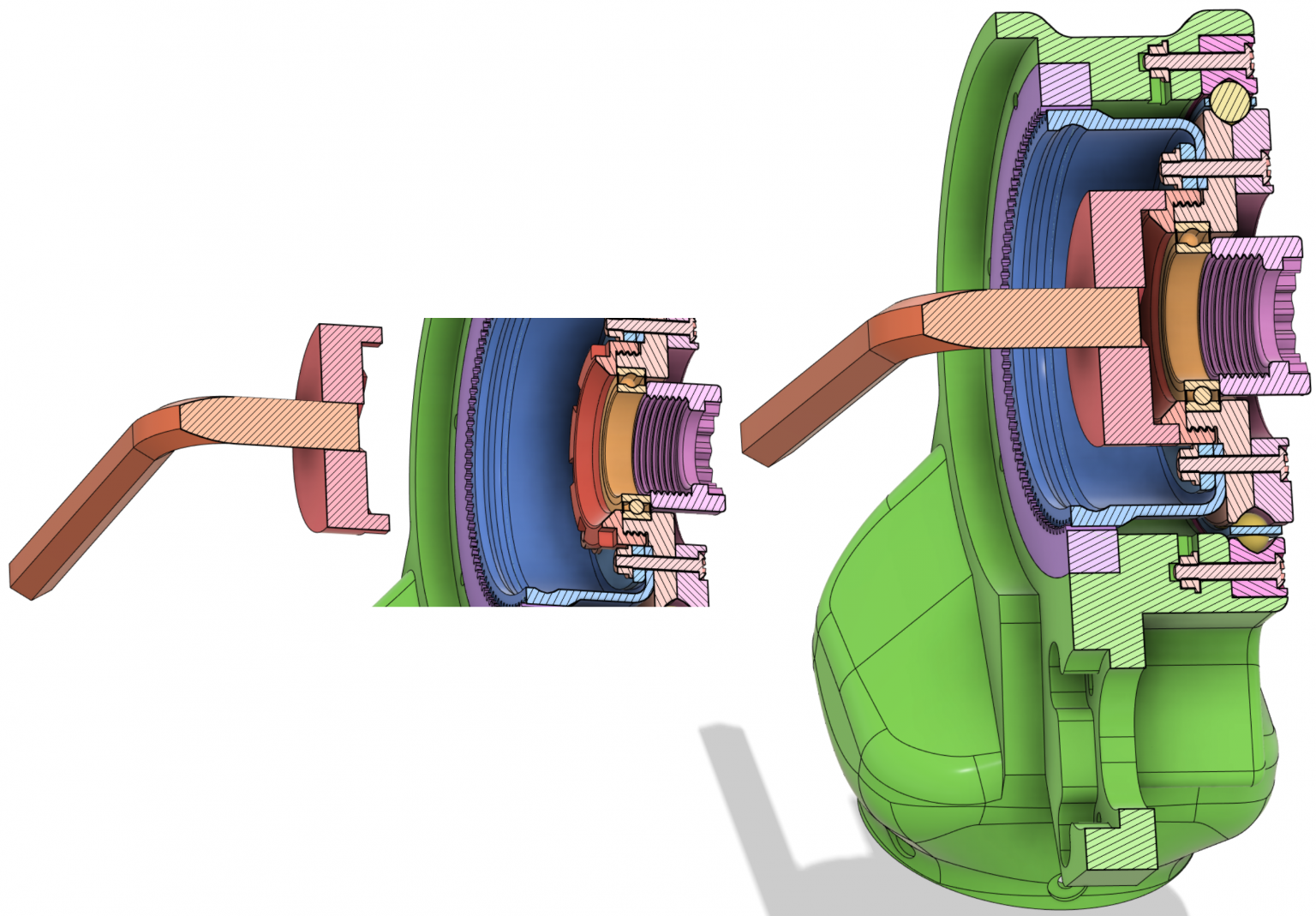
断面図
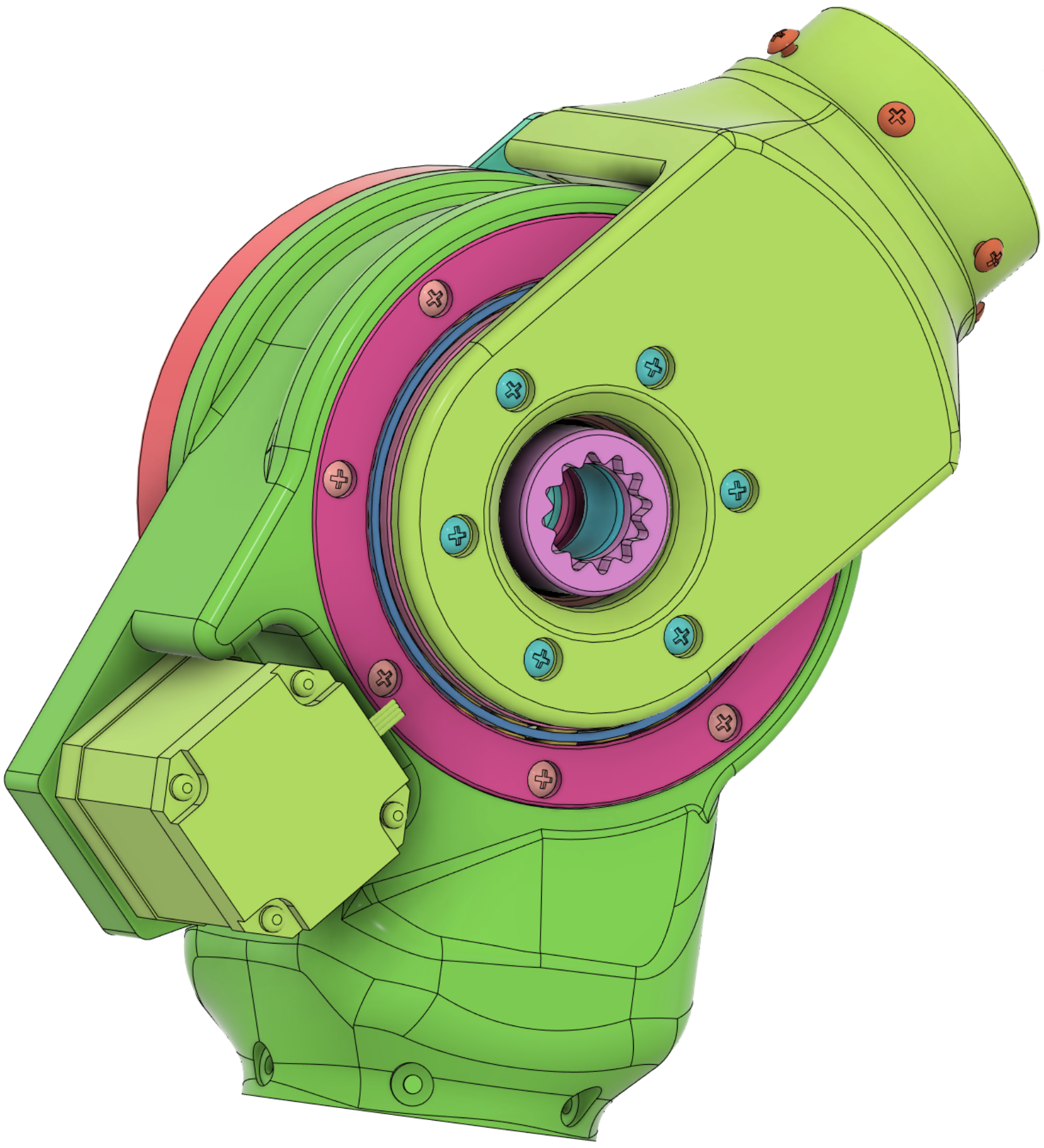
断面は以下の通りです。関節に加わる負荷は、一番外側に取り付けた2つの3Dプリントした4点接触ベアリングで受けます。このうち1つは内輪に波動歯車のフレックススプラインを取り付けて軸の駆動をさせます。もう1つはウェーブジェネレータの支持と出力軸の支持に使用します。

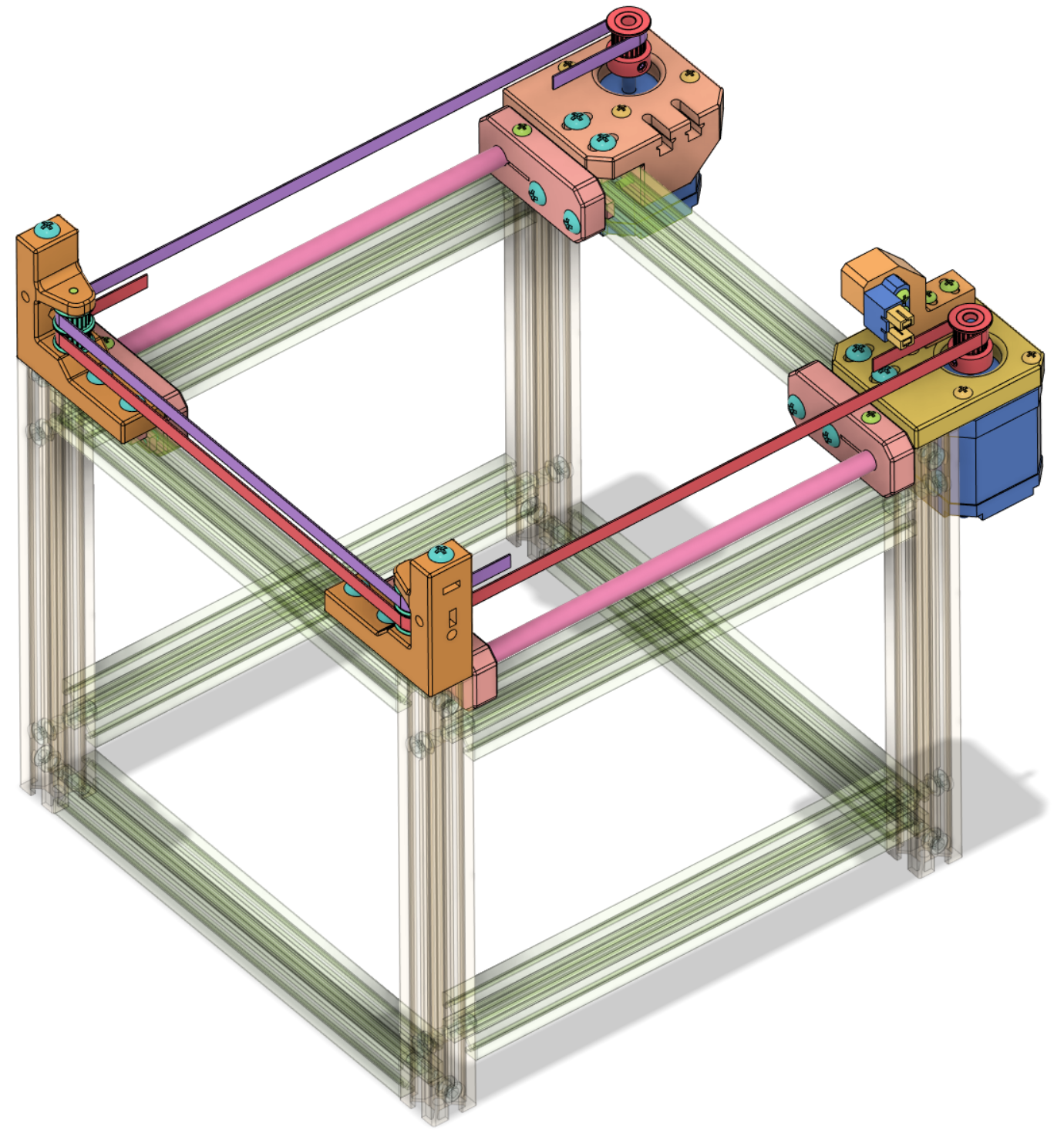
波動歯車のウェーブジェネレータは6805ZZベアリングで支持しています。さらにウェーブジェネレータには駆動伝達用のタイミングプーリーを取り付けていて、タイミングベルトを介してモーターの駆動を伝達する構造にしました。使用するモーターはNEMA17を想定しました。

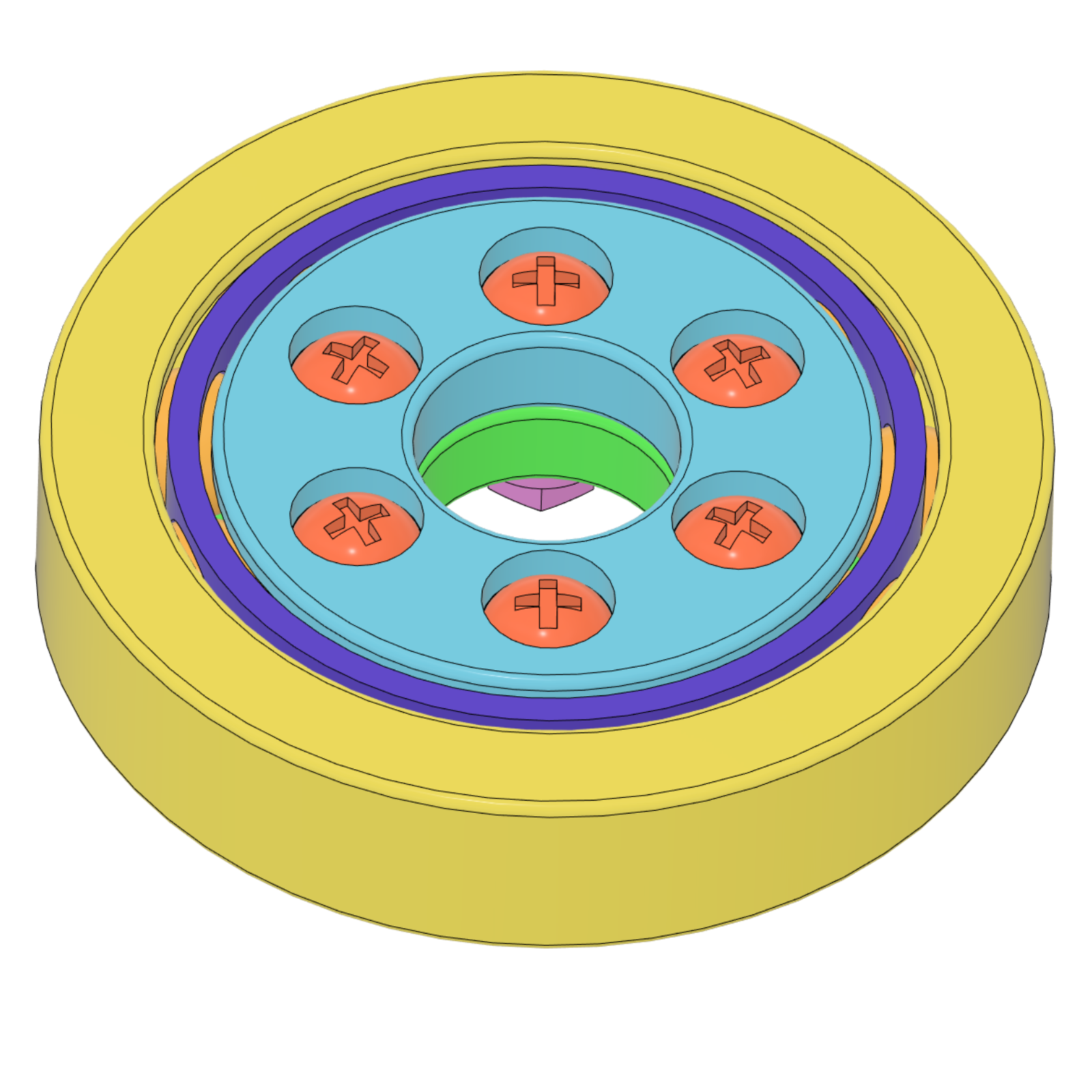
ベアリング固定
ベアリングの内外輪の固定は3Dプリンタで作るロックナットを用いる構造にしました。そのロックナットは3Dプリントして作るロックナット締め付け用治具と六角レンチを使って締め付けます。
多軸化
ジョイントのボディーの接続内径と出力軸の接続内径を同じにしているので多軸化が可能です。
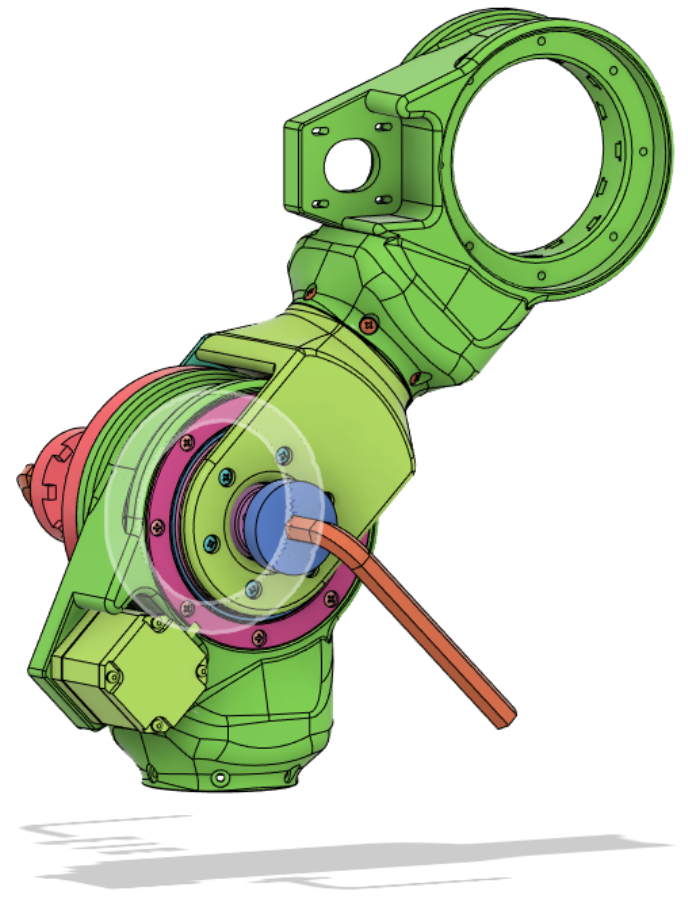
このロボットジョイントをつなげていくと一応垂直多関節ロボットなども構成可能です。

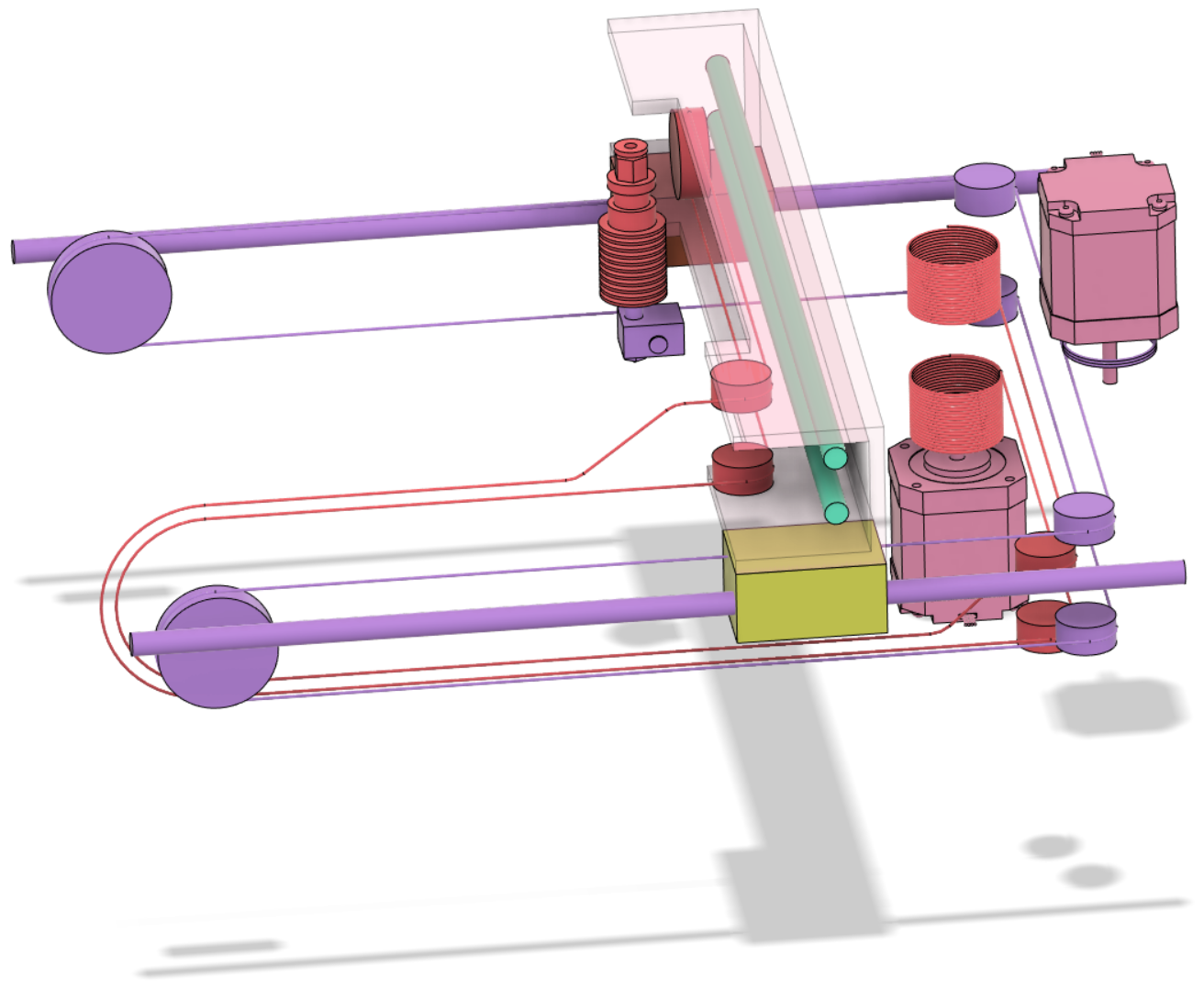
作ろうとした残骸


3Dモデル
アセンブリのSTEPファイル
STLファイル
CIRCULAR_SPLINE_T102.stl
DownloadFLEX_SPLINE_T100.stl
DownloadJOINT_BODY.stl
DownloadJOINT_STAY.stl
DownloadWAVE_GENERATOR.stl
Download