3Dプリンタと8mmBB弾で作る4点接触玉軸受
2020/05/30 categories:3D Printer| tags:3D Printer|Bearing|Four point contact ball bearing|
3Dプリンタで4点接触玉軸受を作ってみました。
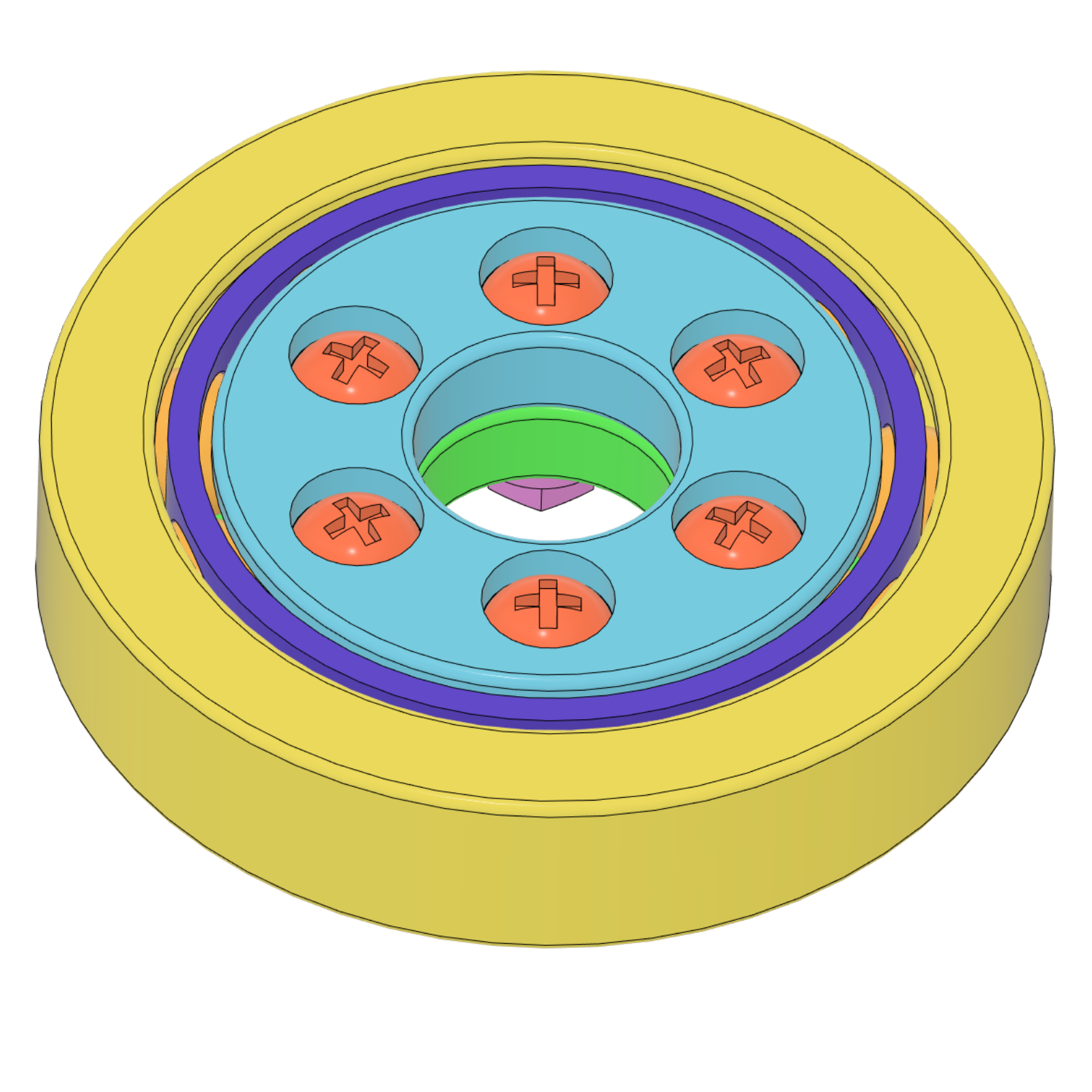
仕様
- 外径53mm
- 内径14mm
- 厚さ11mm
- BB弾直径8mm
- ボールの数11個
- 接触角45°
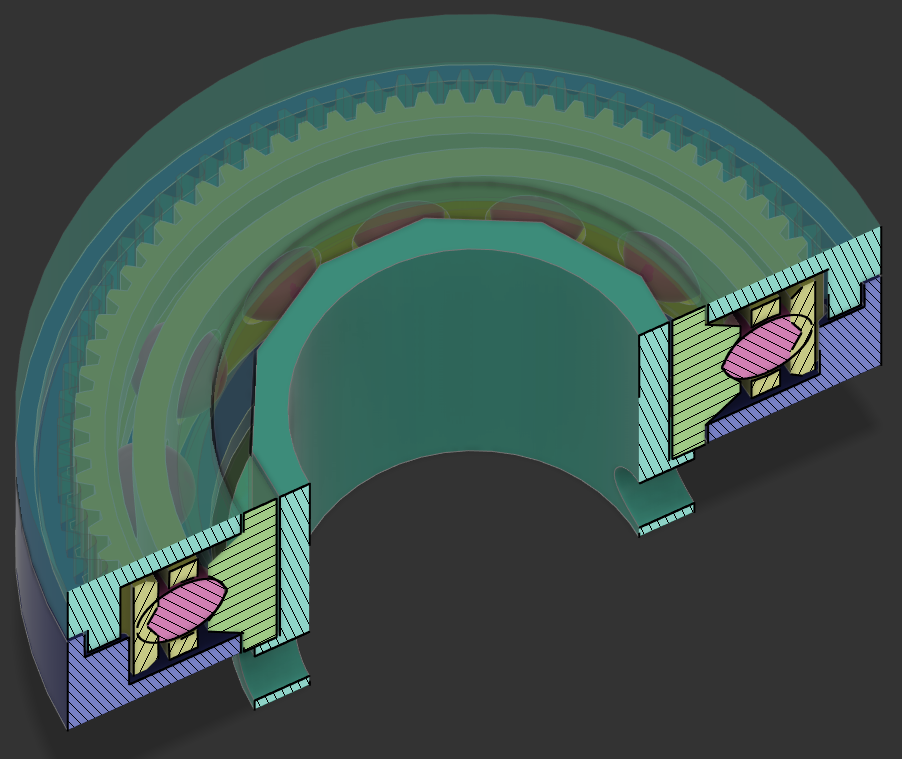
断面
内輪を分割してボールを挟み込むようにしてボールに与圧をかける構造にしました。また、ボールにはリテーナーを付けて、ボール同士が接触しないようにしています。ボールの数は奇数のほうが良いのかなと思って11個にしました。奇数個と偶数個のどちらが良いかは少し調べてみましたがよくわかりませんでした。
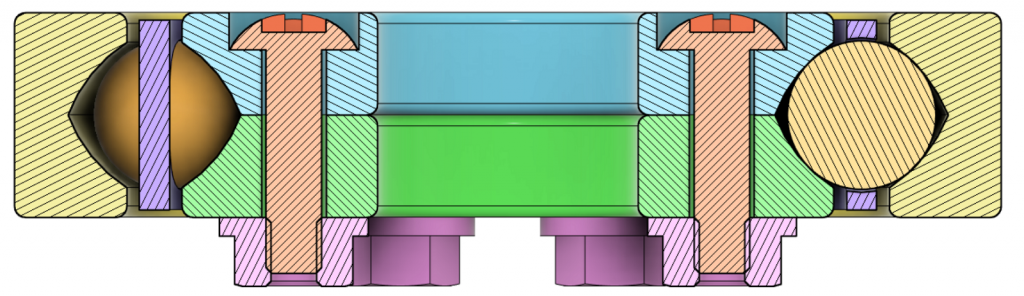
接触角
一般的に接触角が45°以下のものはラジアル軸受け、45°を超えるものはスラスト軸受けとして分類されるようです。今回はちょうど中間の45°で作ってみました。
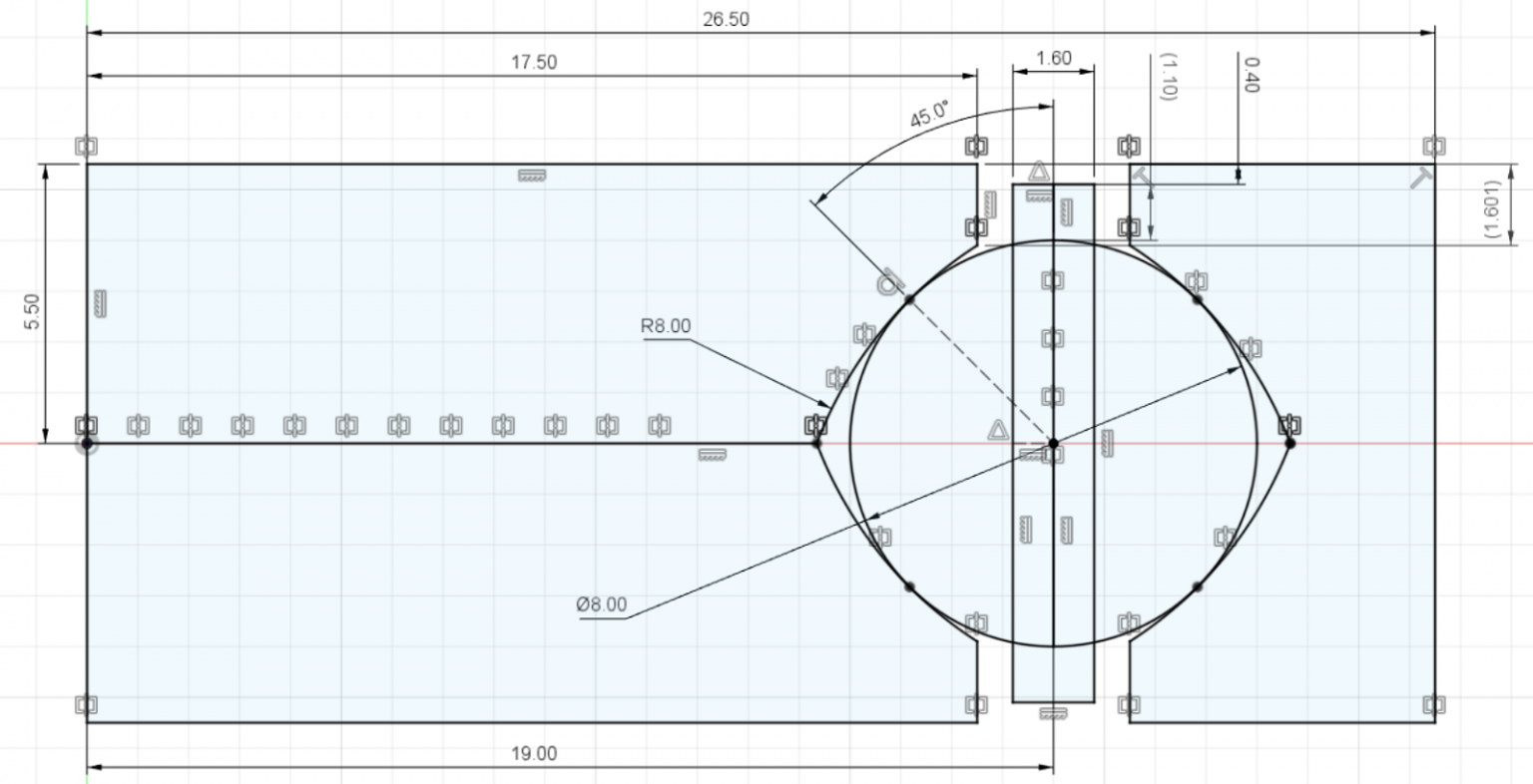
軌道面の形状はゴシックアーチ形状としています。アーチ部のR8は適当で、サイズをいろいろ変えてみていい感じの見た目だったのがR8だったというだけの理由です。
プリントしてみた
実際にプリントしたものは下記のような感じです。分割した内輪によって与圧がかけられているのでガタは無く、触った感じはかなりガッチリしています。与圧によって軌道面が潰れて転がり摩擦が増えているためか、回転抵抗がかなりあります。そのため高速回転は無理でしょう。また、3Dプリンタで作っているので部品精度があまり良くなく、振れなどの精度はあまり良くないでしょう。それでも3Dプリンタで作るロボットアームのようなあまり精度が必要なく低回転高剛性の用途には使えるのではないかと思います。

所感
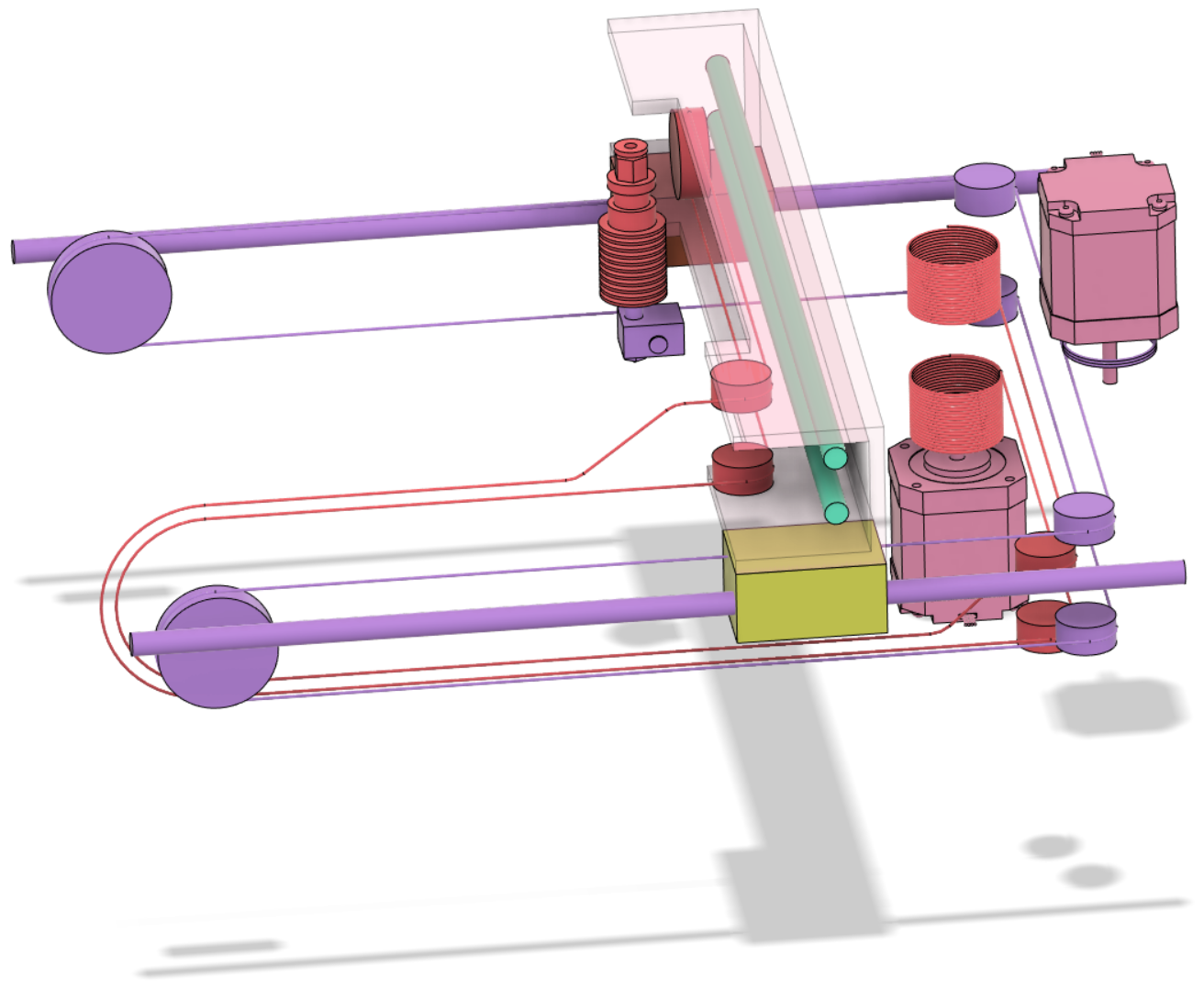
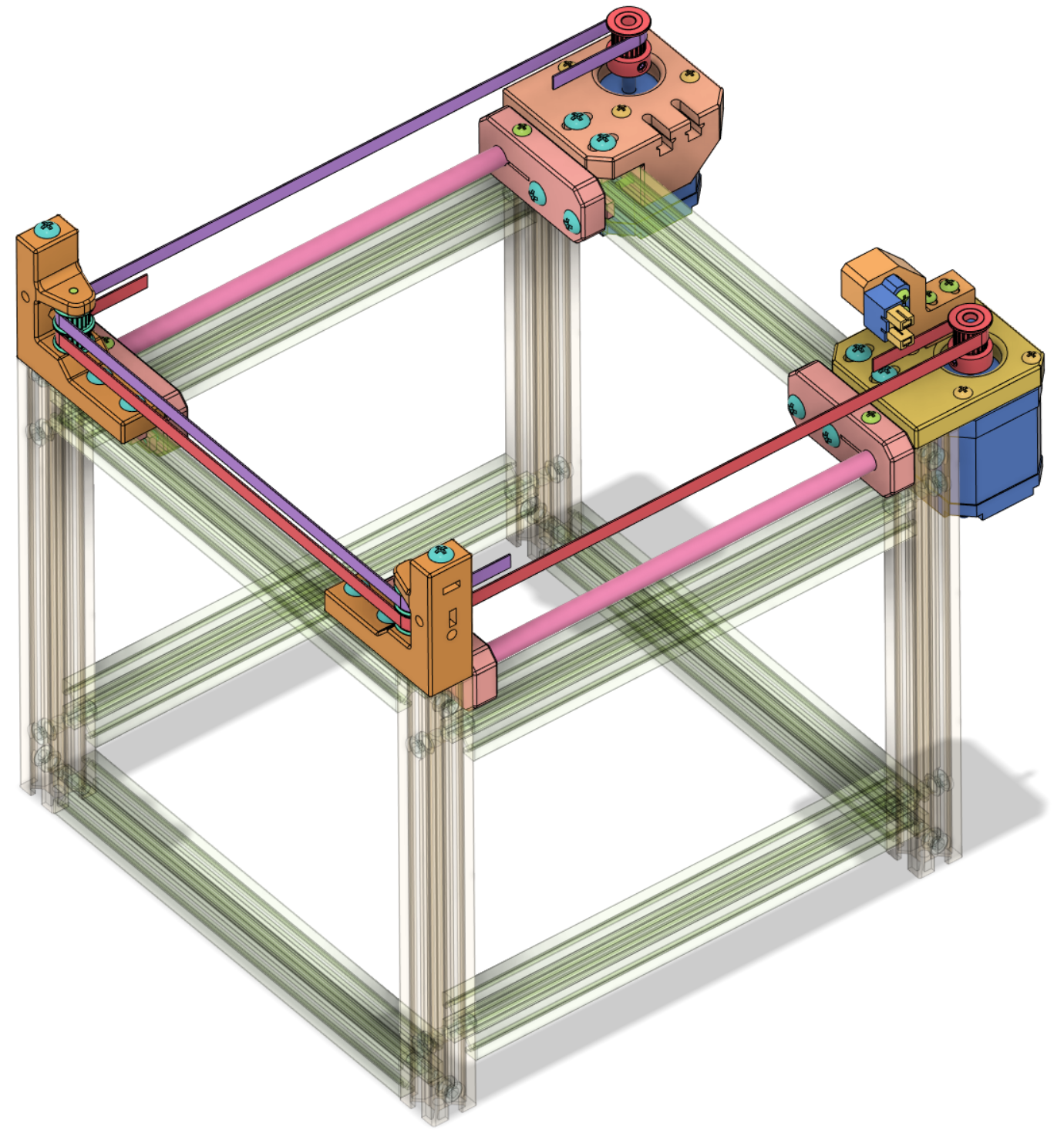
3Dプリンタで6軸ロボットを作ろうと思っていろいろモデリングしていましたが、結構な数のベアリングが必要で意外とコストがかかるなぁと悩んでいました。そこで大径のベアリングは3Dプリンタで作れば、自由な形状にすることができるし、コストも減らせると思ったので今回のようなBB弾を使ったベアリングを作ってみました。このベアリングとハーモニックドライブでロボットアームを作ってみようと思います。