3Dプリンタのワイヤ駆動を考えてみる
2020/05/13 categories:3D Printer| tags:3D Printer|Wire driven|
Youtubeでワイヤ駆動のロボットを見てすごいと思ったので3Dプリンタのワイヤ駆動をサクッとモデリングしてどんな感じになるか考えてみました。
ワイヤ駆動の特徴
ワイヤ駆動の特徴で思いつくのは下記のようなものでしょうか。
- ワイヤの伸びが少ない(ほぼゼロ?)
- ワイヤはベルトやボールねじなどに比べて軽いからイナーシャが減る
- 滑車の原理を使って力を増幅できる
- ベルトやボールねじなどに比べて小さい
- 駆動源を離せる
よく見る使用例は自転車のワイヤでしょうか。昔のフィルムの一眼レフカメラの中にも入っていたりして意外といろんなものにワイヤを使った機構があるみたいです。
ワイヤの最小曲げ半径を調べる
ワイヤを使った設計は初めてなので、最小曲げ半径を調べてみました。
まずはモノタロウでワイヤと検索してみるとワイヤロープステンレスという商品がヒットして直径が1、1.5、2、3、4、6mmとあったのでとりあえずΦ1mmx5mを仮選定しました。いろいろググるとワイヤの構成が最小曲げ半径に関係するようです。モノタロウのΦ1mmのワイヤの構成を確認すると7×7と書いてあったので、Φ1mmの7×7について調べてみると、
7x7構造ロープは滑車の直径が使用ロープ径の40倍以上
D≦8の場合2D
と書いてありました。Φ1の7×7の場合、プーリーの径は20~40mmあたりが下限になるのかと思います。曲げ半径が小さすぎるとロープの曲げ応力が大きくなりすぎるようです。プーリーを大きくするとスペースも取りますのでプーリーの径はΦ20としてモデリングすることにしました。
モデリングしてみた
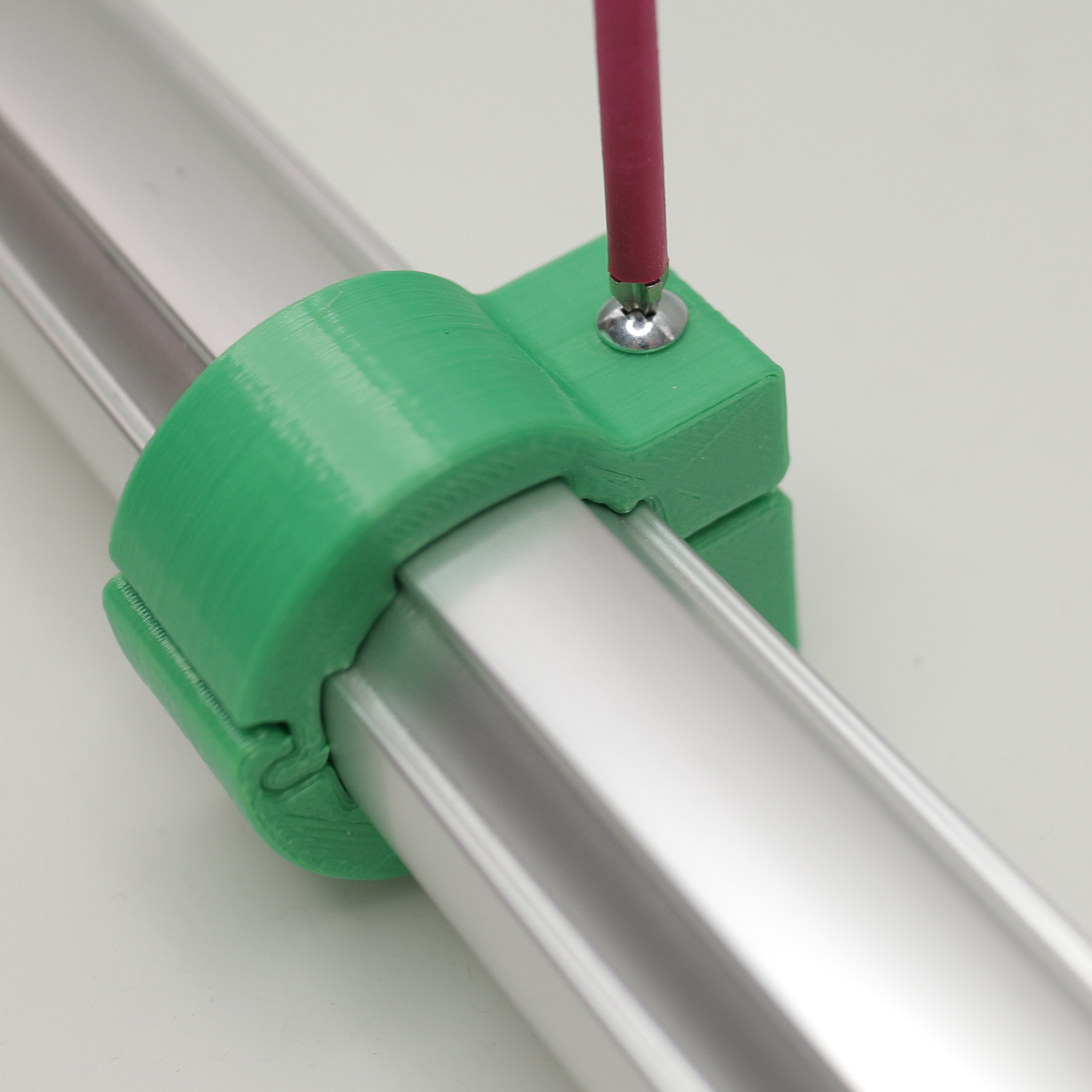
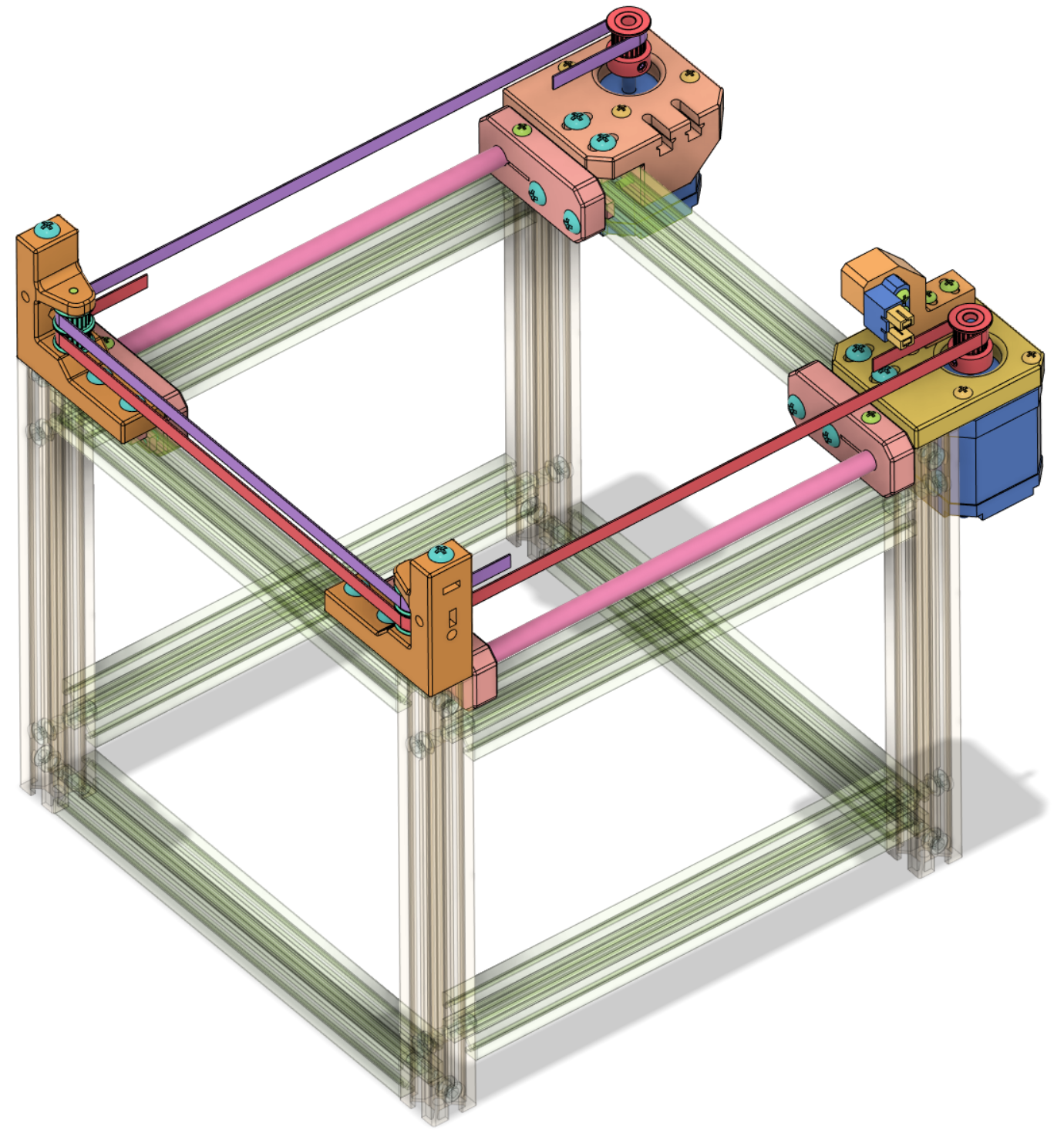
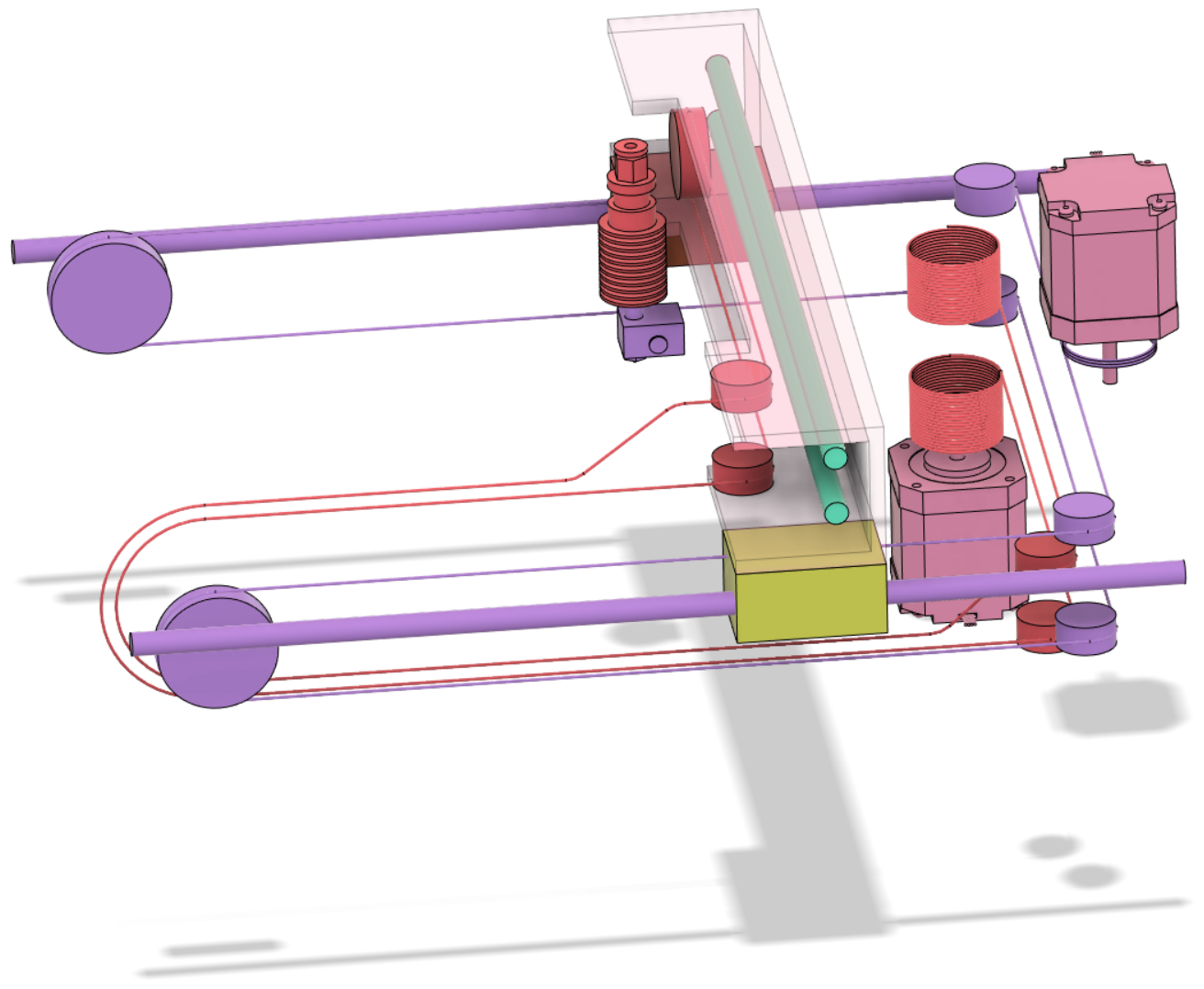
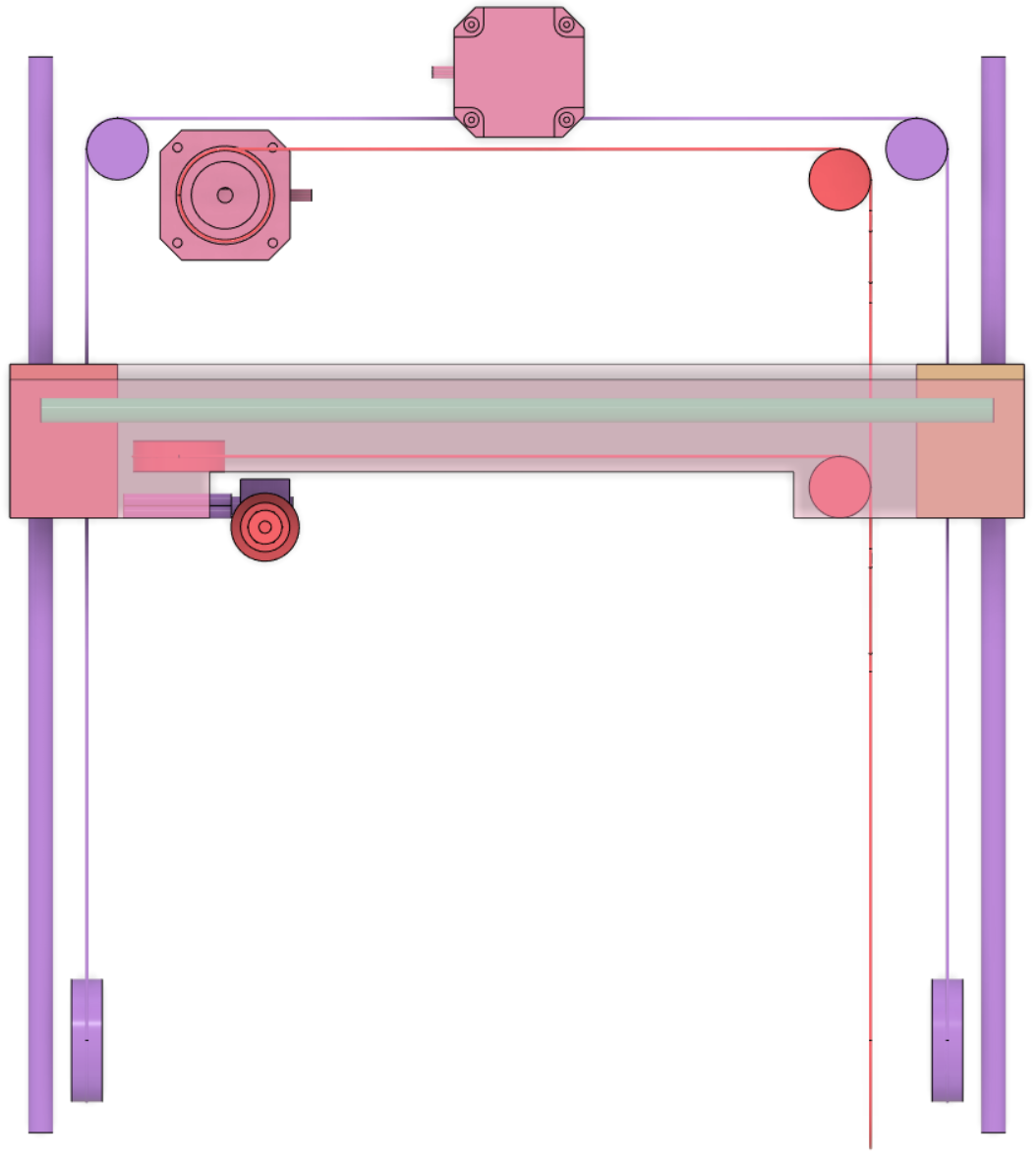
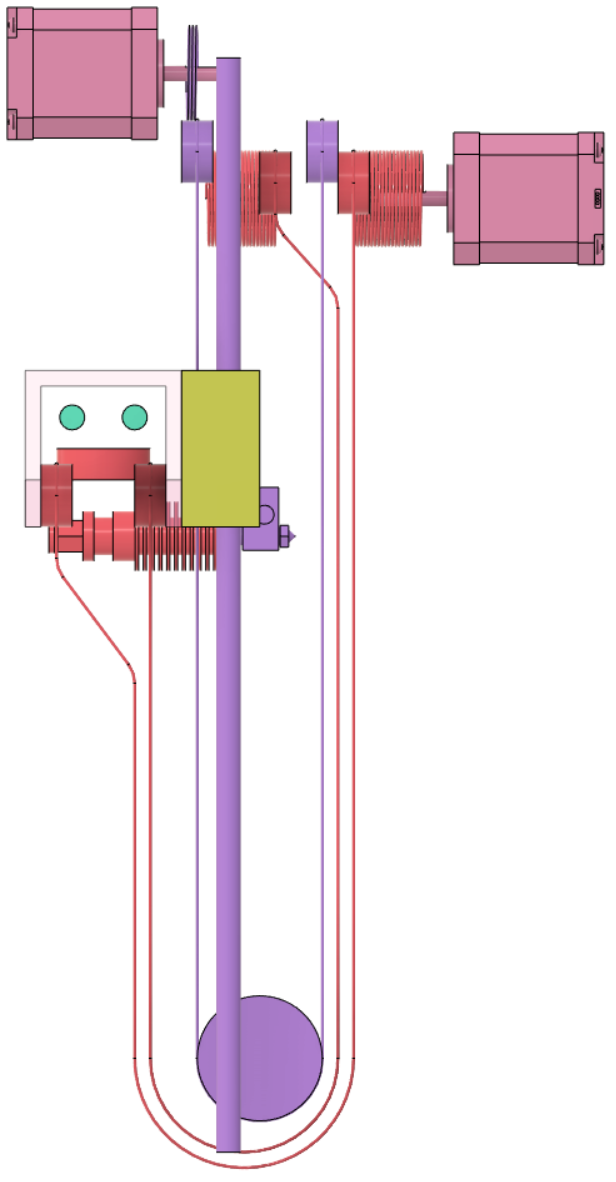
とりあえず主要部品を並べてみました。赤いワイヤがX軸用で紫がY軸用です。X、Yのモーターはどちらも駆動負荷にならないようにしたかったので、駆動部に設置しないようにしました。そのためにX軸用のワイヤにはアウターワイヤを付けてケーブルベヤ内を通すようにしたら、X軸を可動部から離れたところから駆動できると思います。
3Dモデル
アセンブリのSTEPファイル
STLファイル
WiRE_DRIVEN_3DPRINTER.stl
Download